正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
Now, I am asking 5-optical common sense quiz. Each of the answering time-limit is 20-second. 光学常識問題を5つご用意しました。制限時間は、いずれも20秒です。
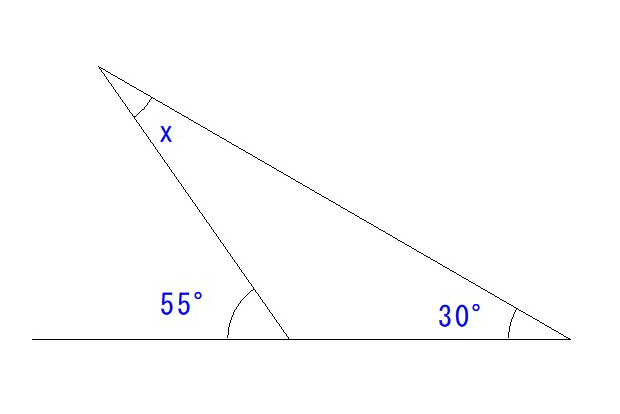
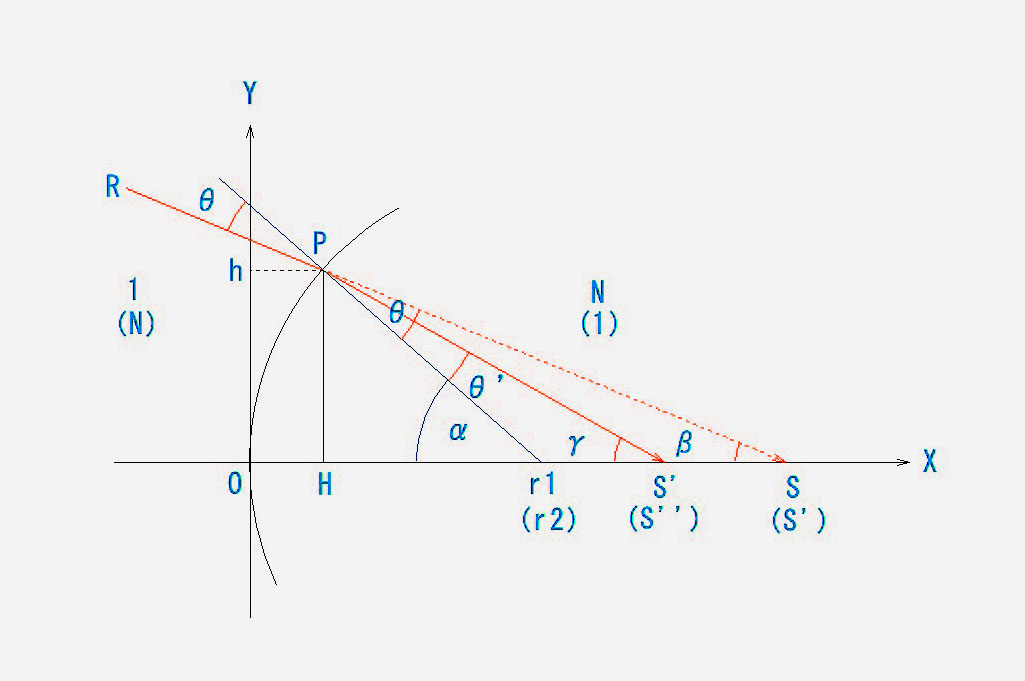
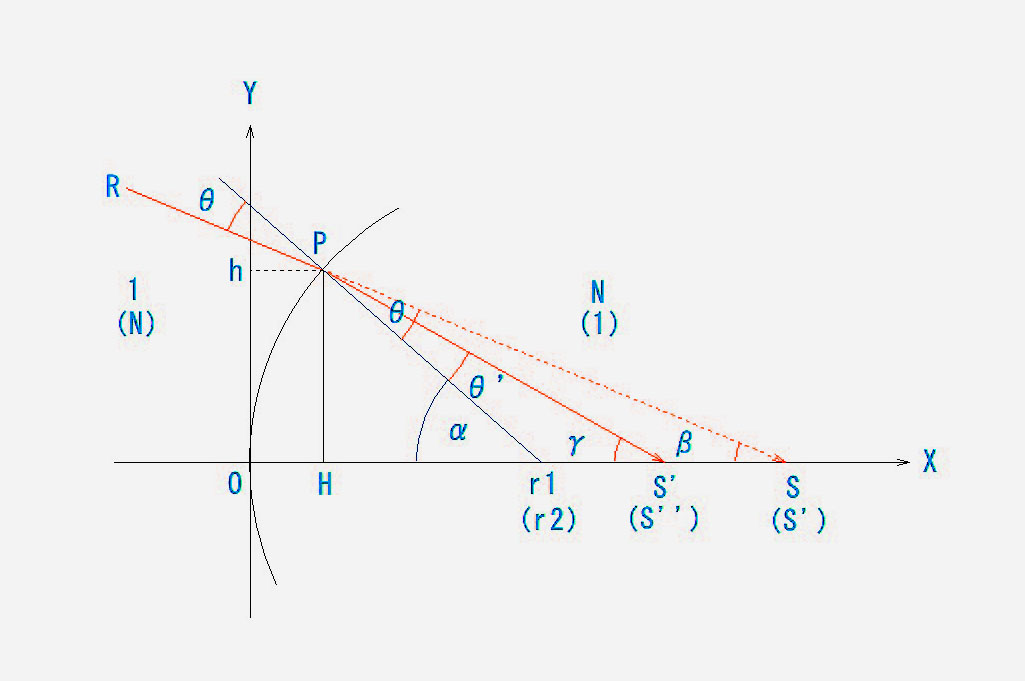
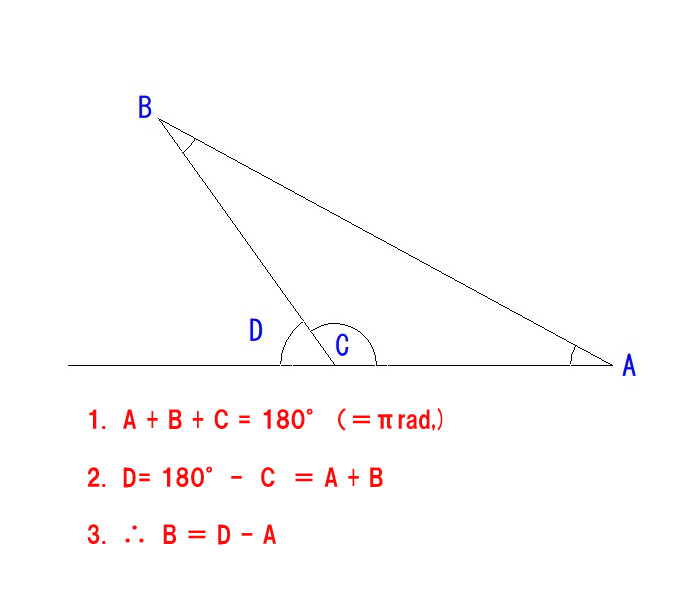
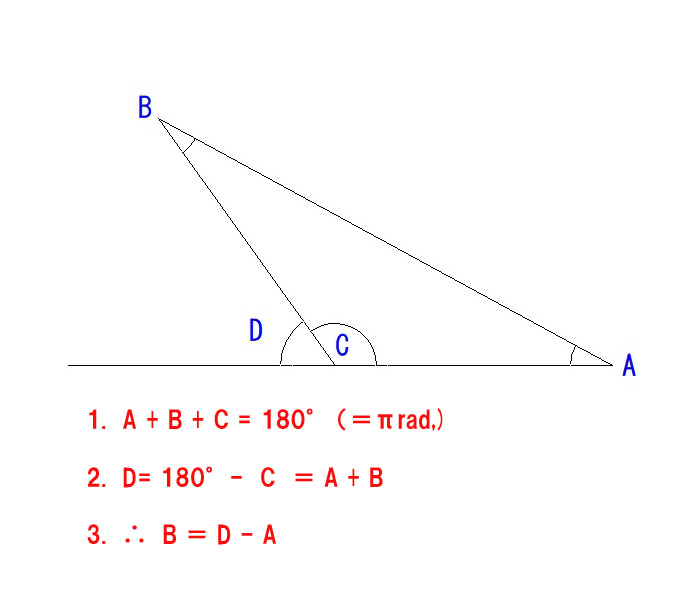
Q1; What is the angle “X”? 角x?
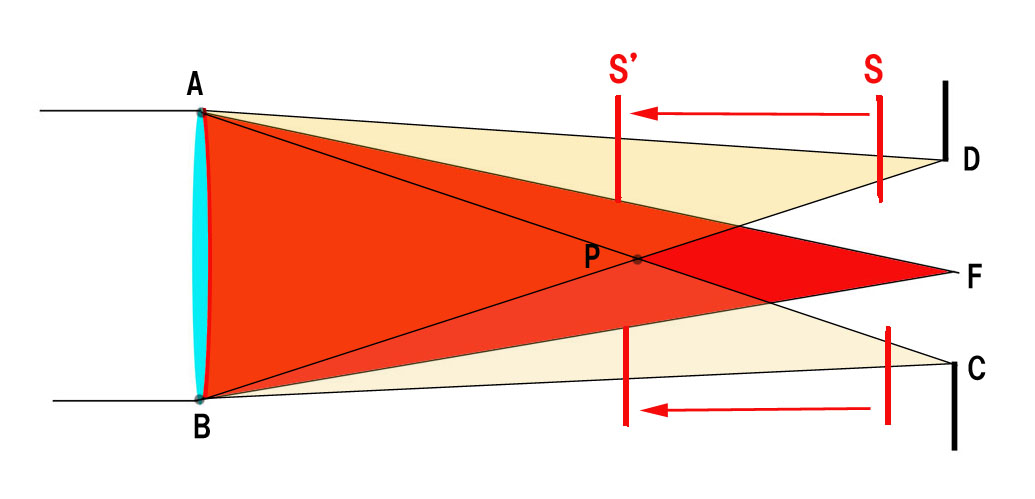
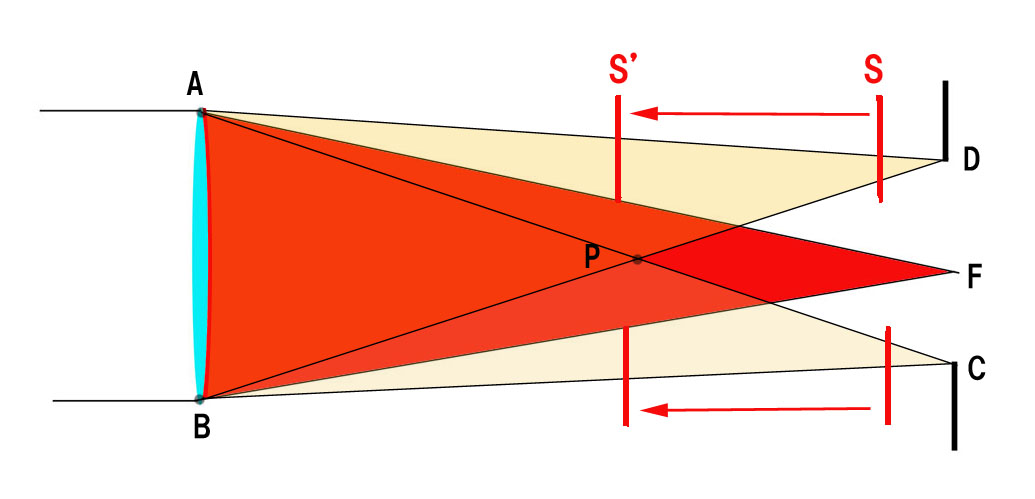
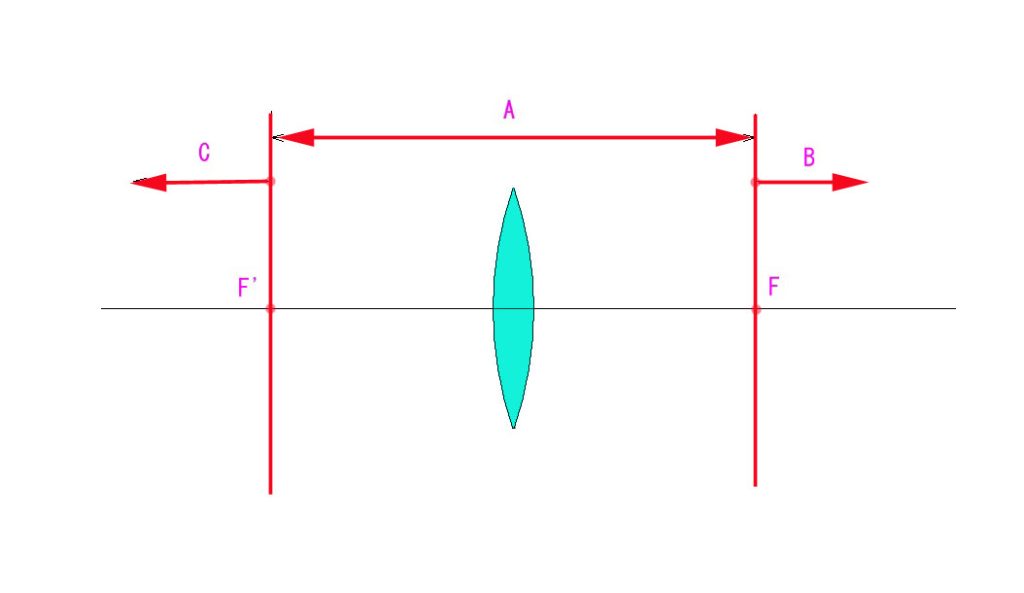
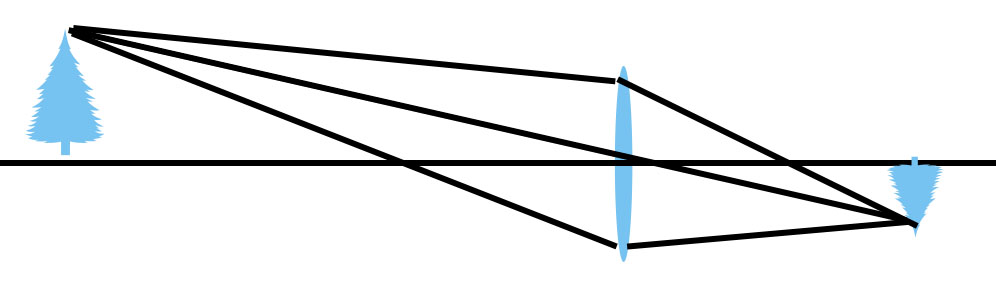
Q2; Which is the area that will not allow the real image of the real object? 実物点の実像が出来ない範囲は 1~3 のどれ? 1. A, 2.B & C, 3. nothing (該当なし)
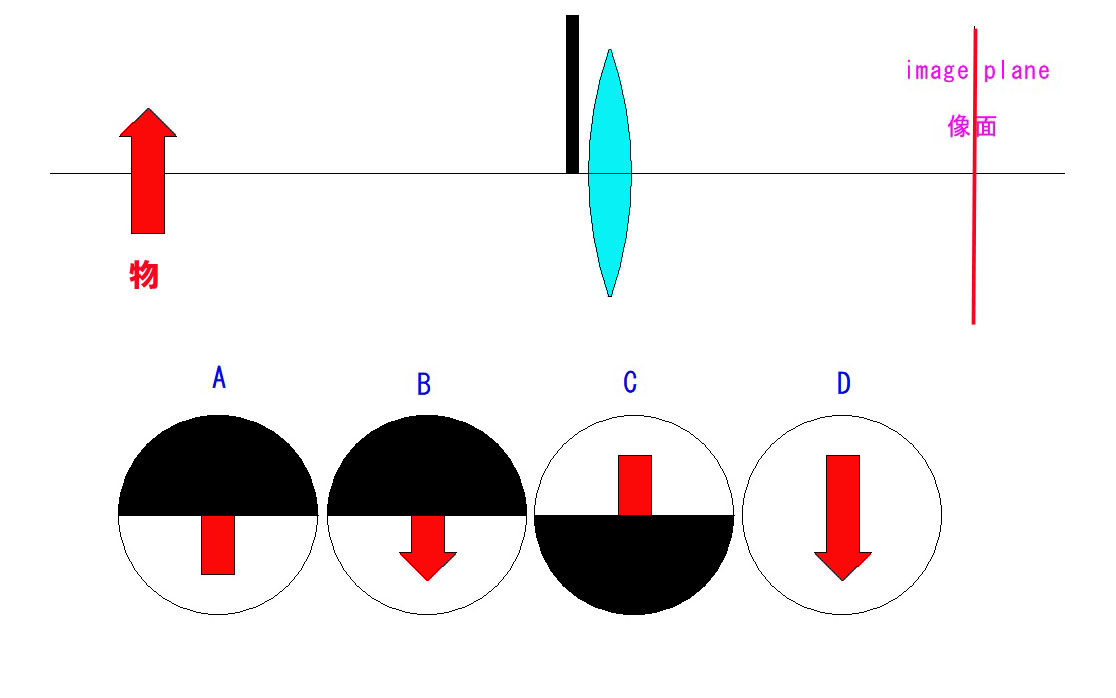
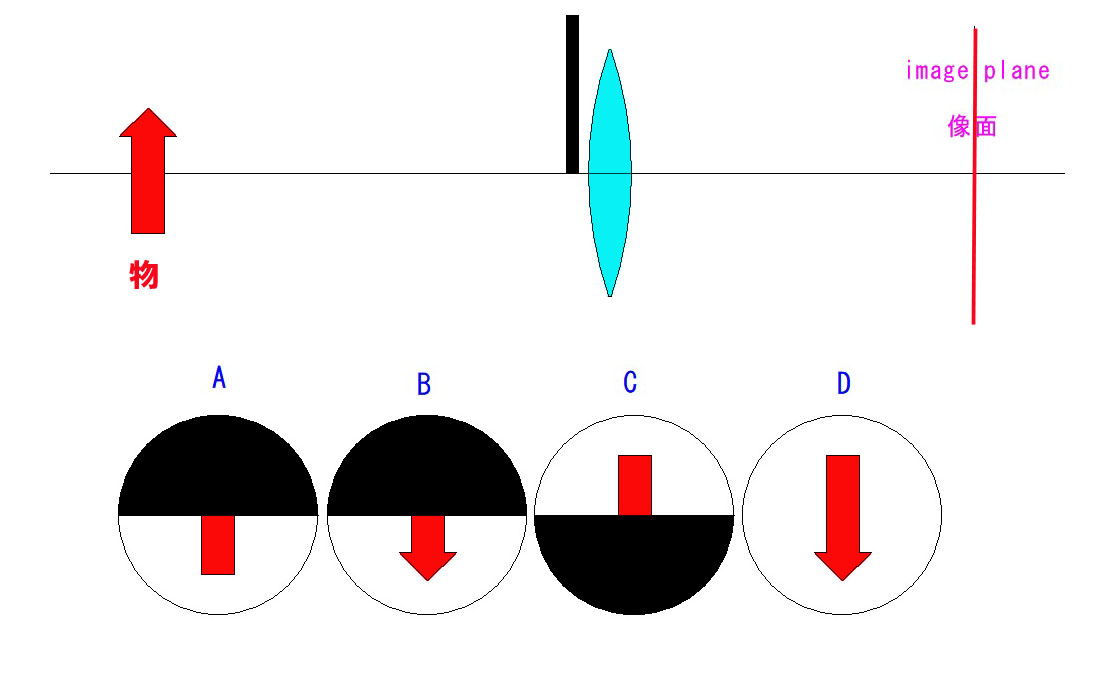
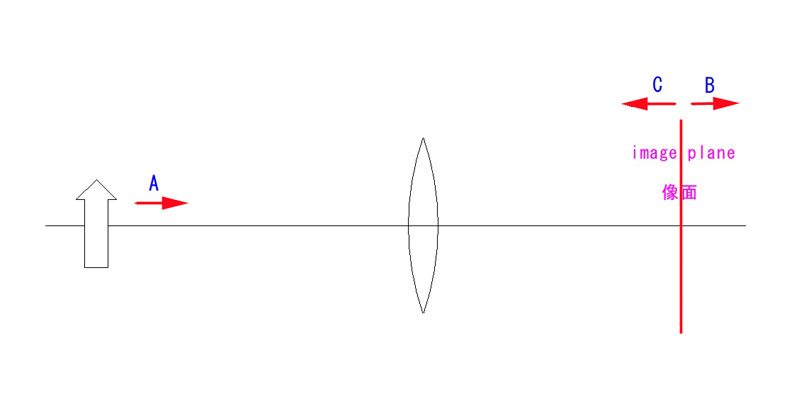
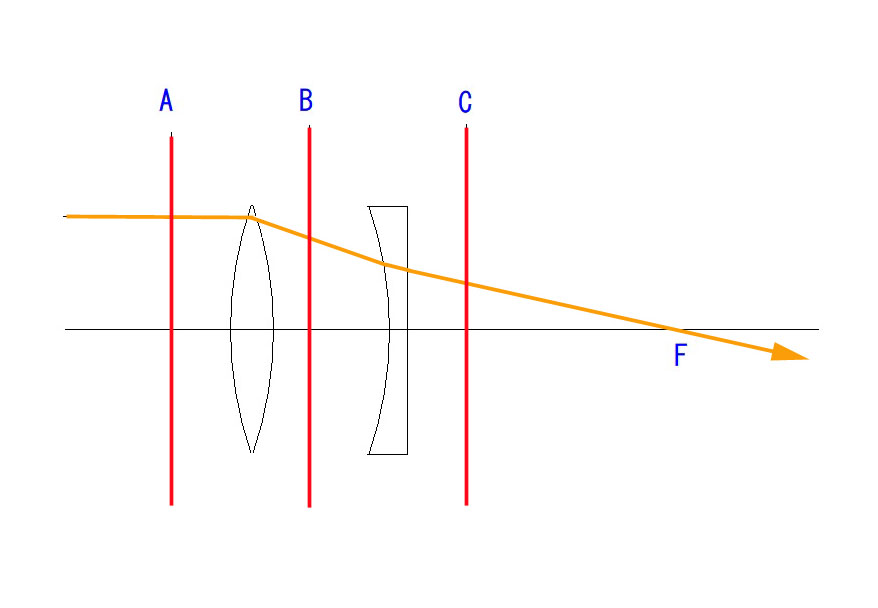
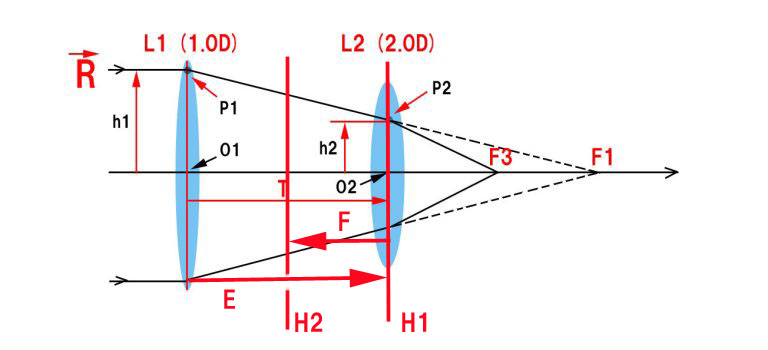
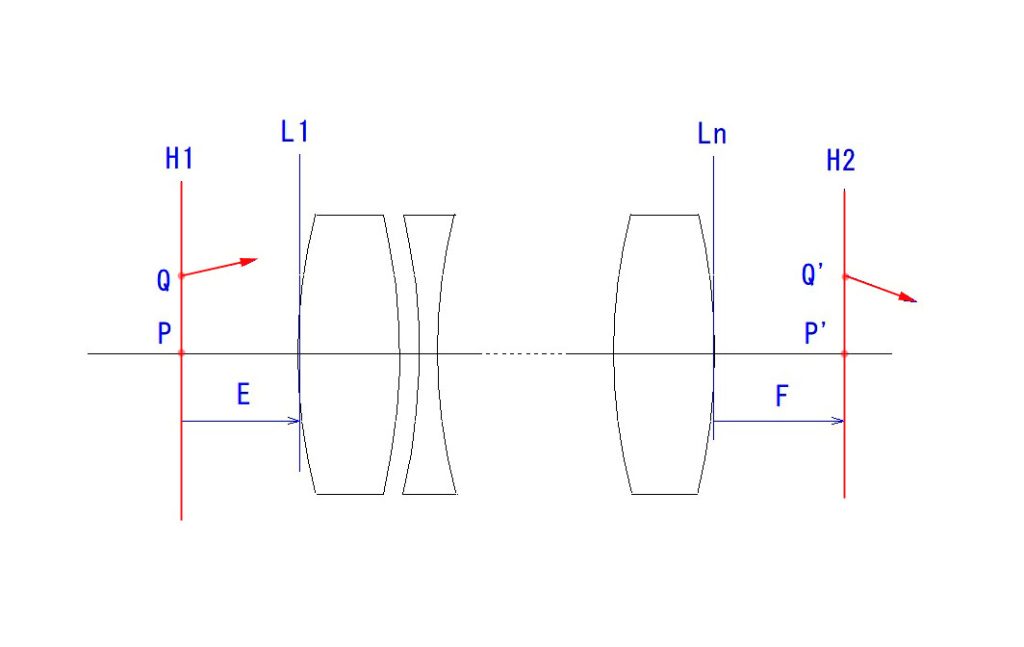
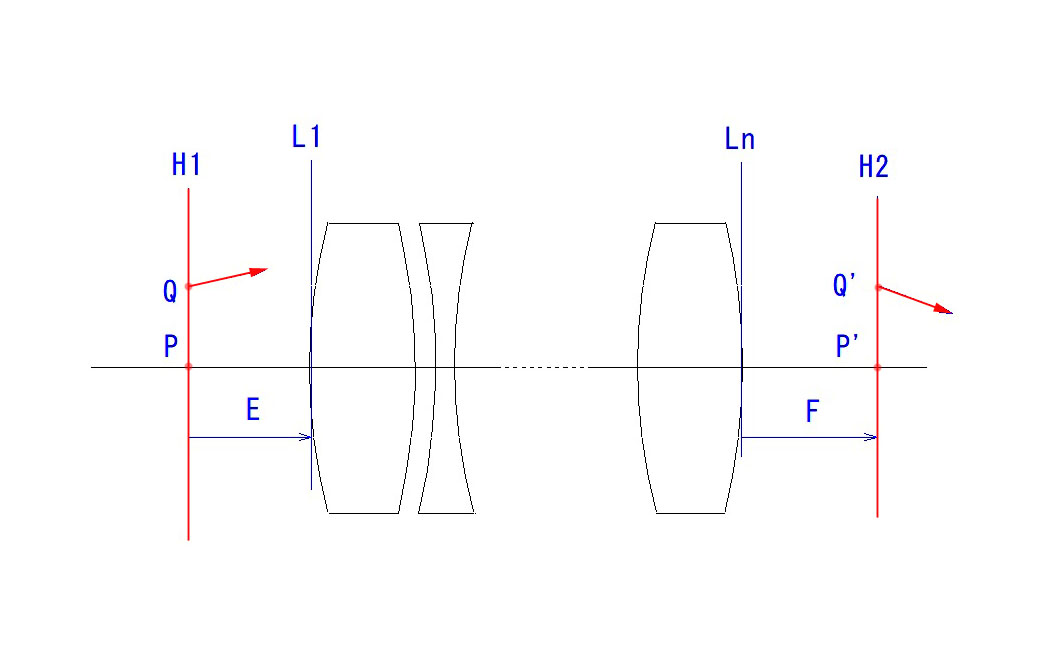
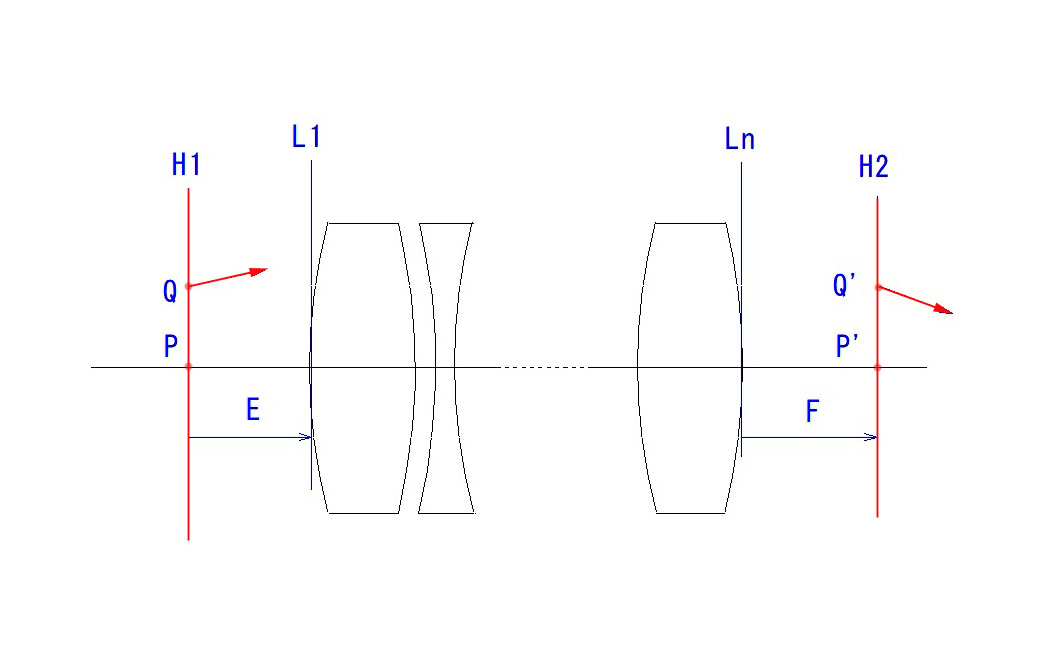
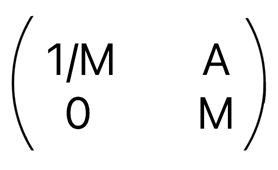
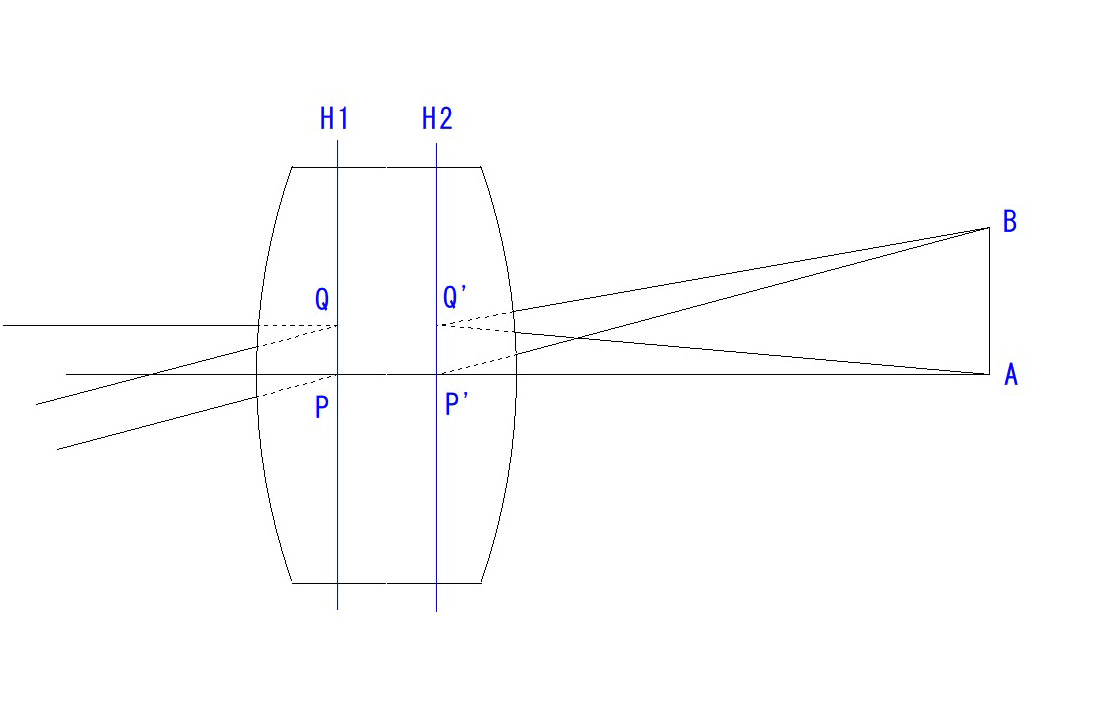
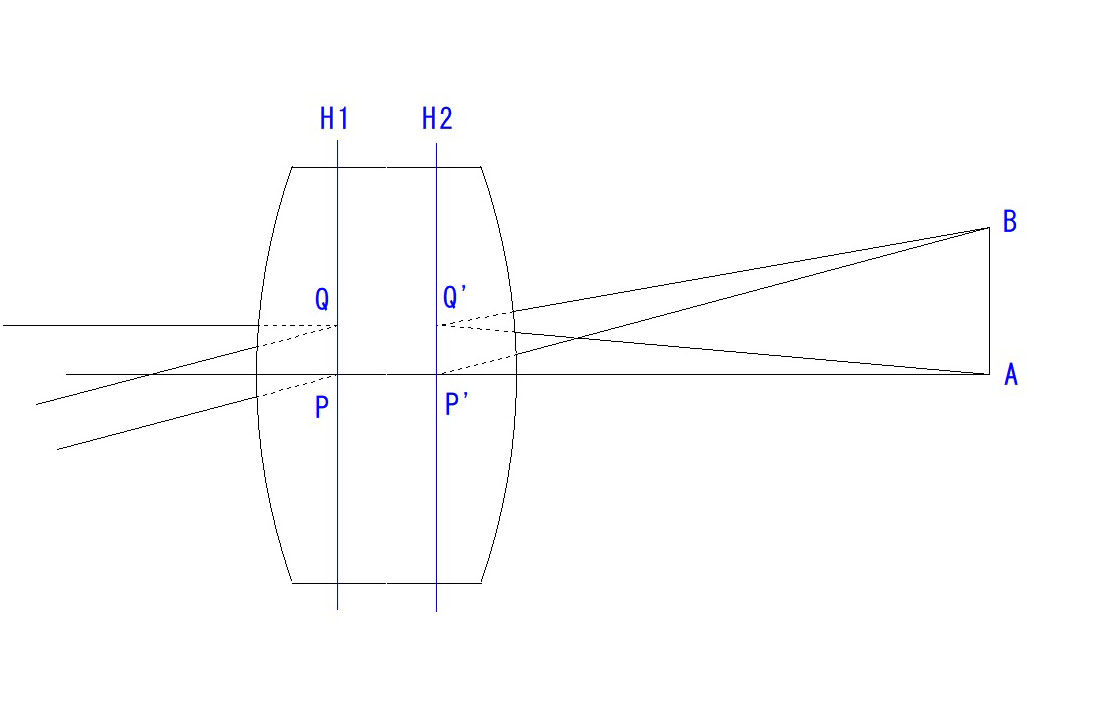
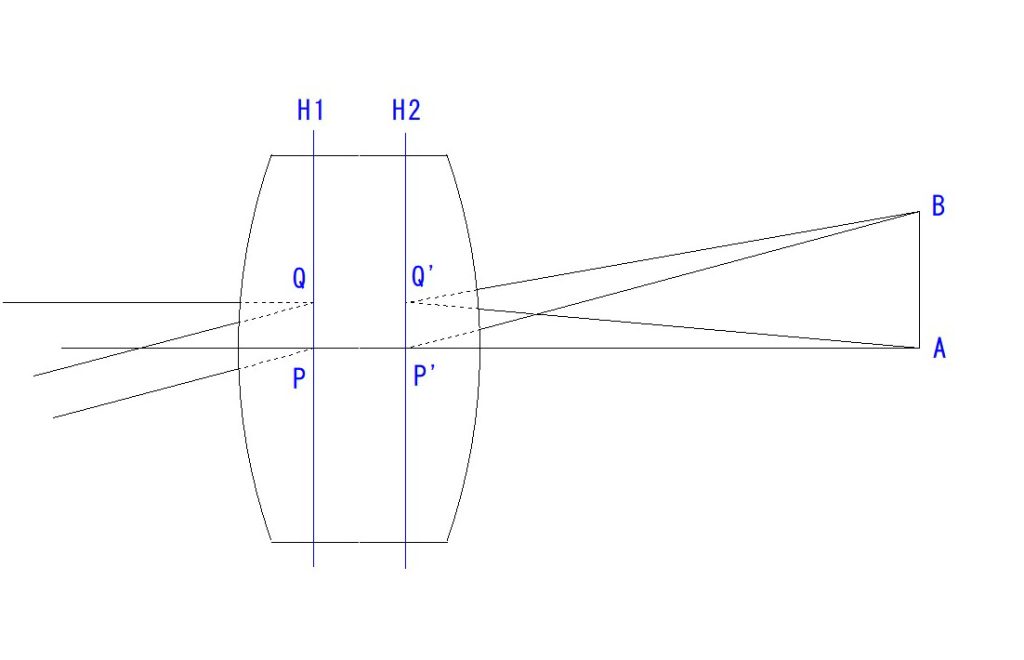
Q3; Which is the right image? (Upper half of the lens is closed.) 上半分を遮蔽したレンズの結像。正しいのはどれ?Q4; The direction of the movement of the focal plane? 実物をAの方向に動かした時の像面の移動方向は、 B,C のどちら?Q5; Which is the image-side principal plane? 像側主面はどれか?(A~C)