正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
カテゴリー: BINO Progress Report | 製作状況速報
日英併記としましたのは、海外向けの他、国内の方にも、より多い情報量を効率良くお届けしたい(共有したい)からです。
両者は必ずしも同一内容ではございません。英語の方がよりストレートに表現できる場合もありますし、両言語で内容を補完し合っていることもございます。 FACEBOOKでは、よりリアルタイムな情報とユーザー様からのフィードバックが見れますので、そちらもぜひご参照ください。
Please check my FACEBOOK, too.
You can see the older posts at the Internet Archives,too.
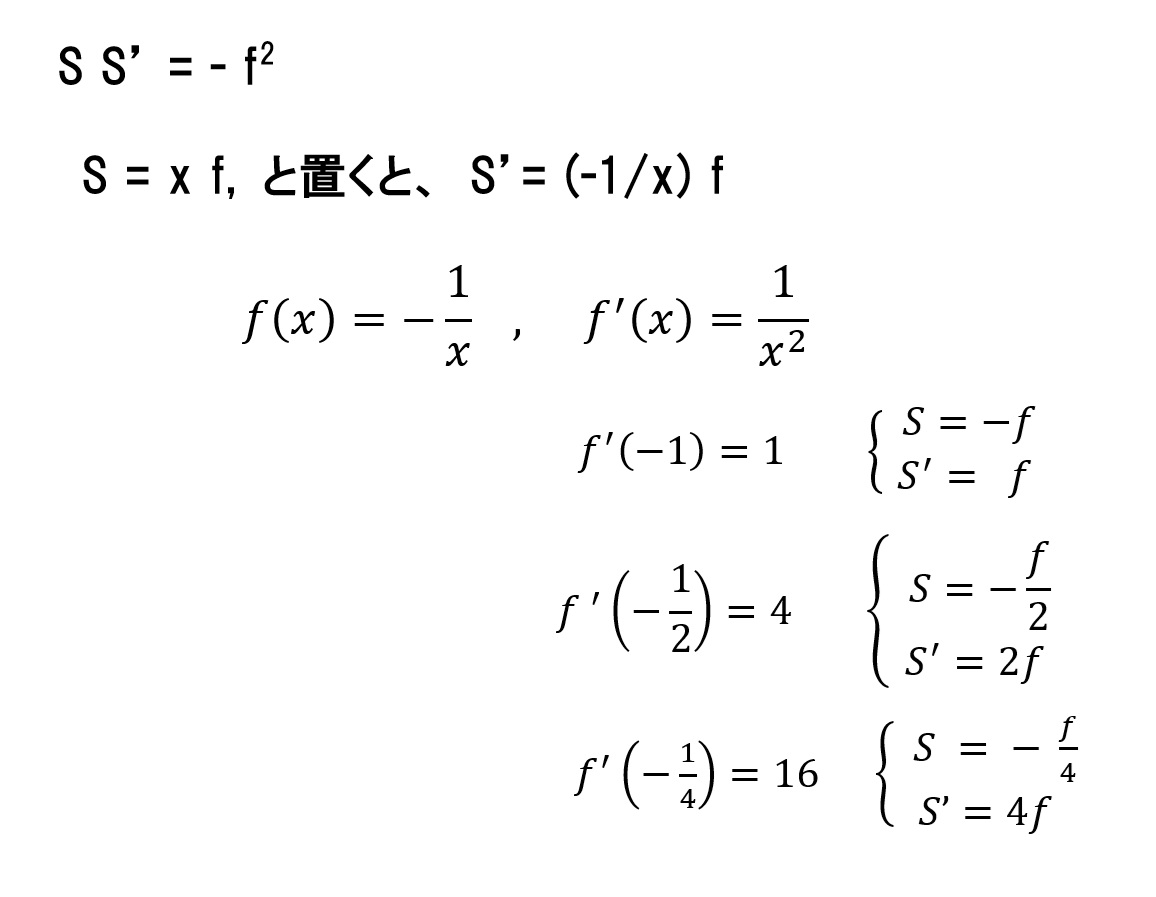
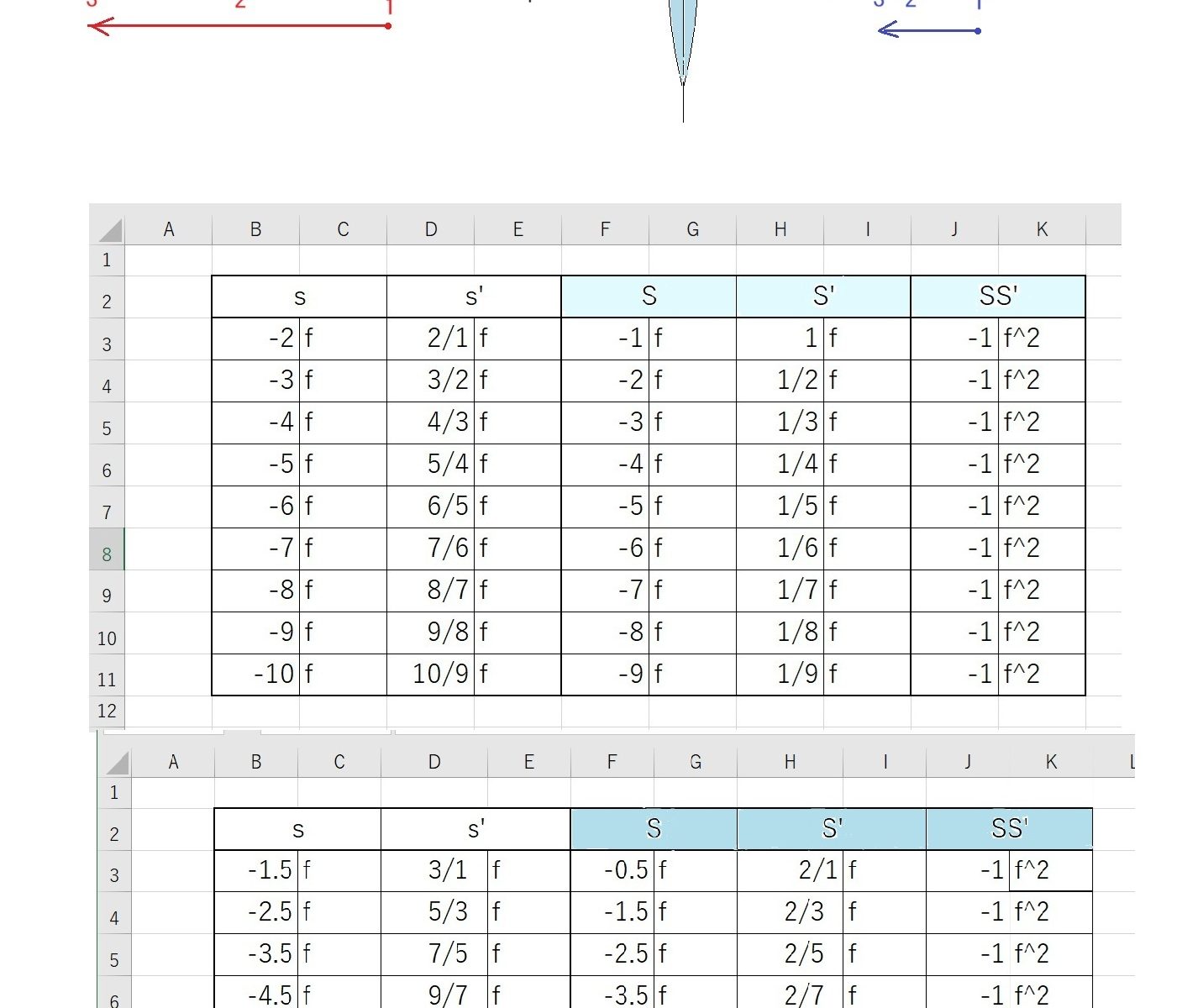
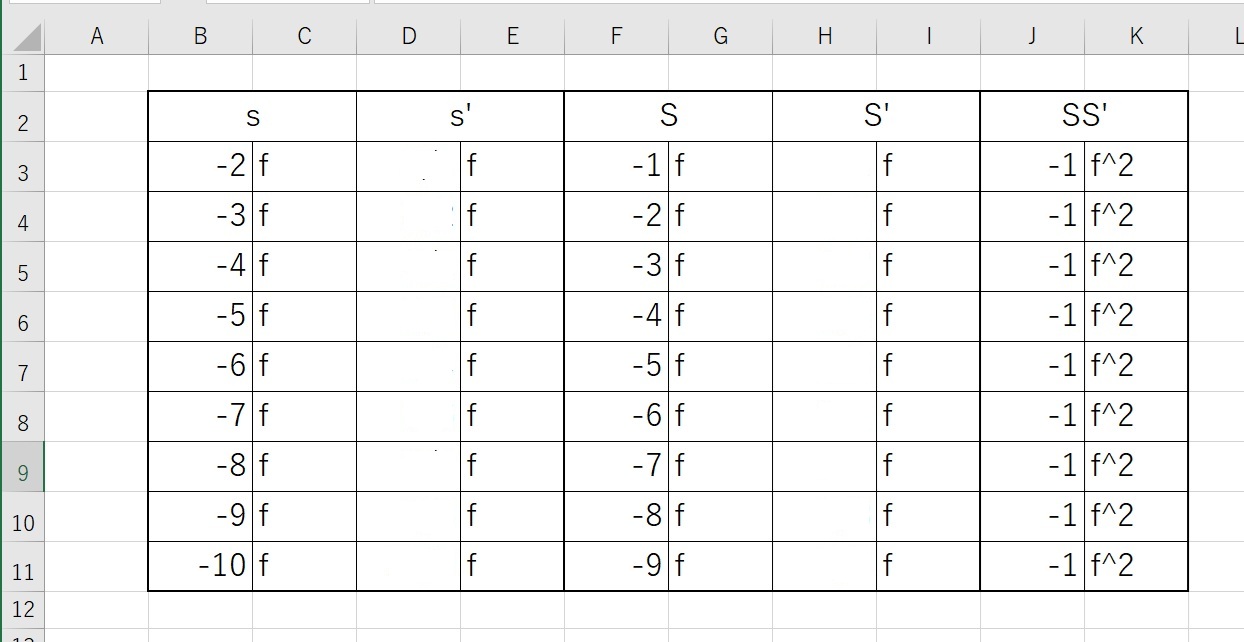
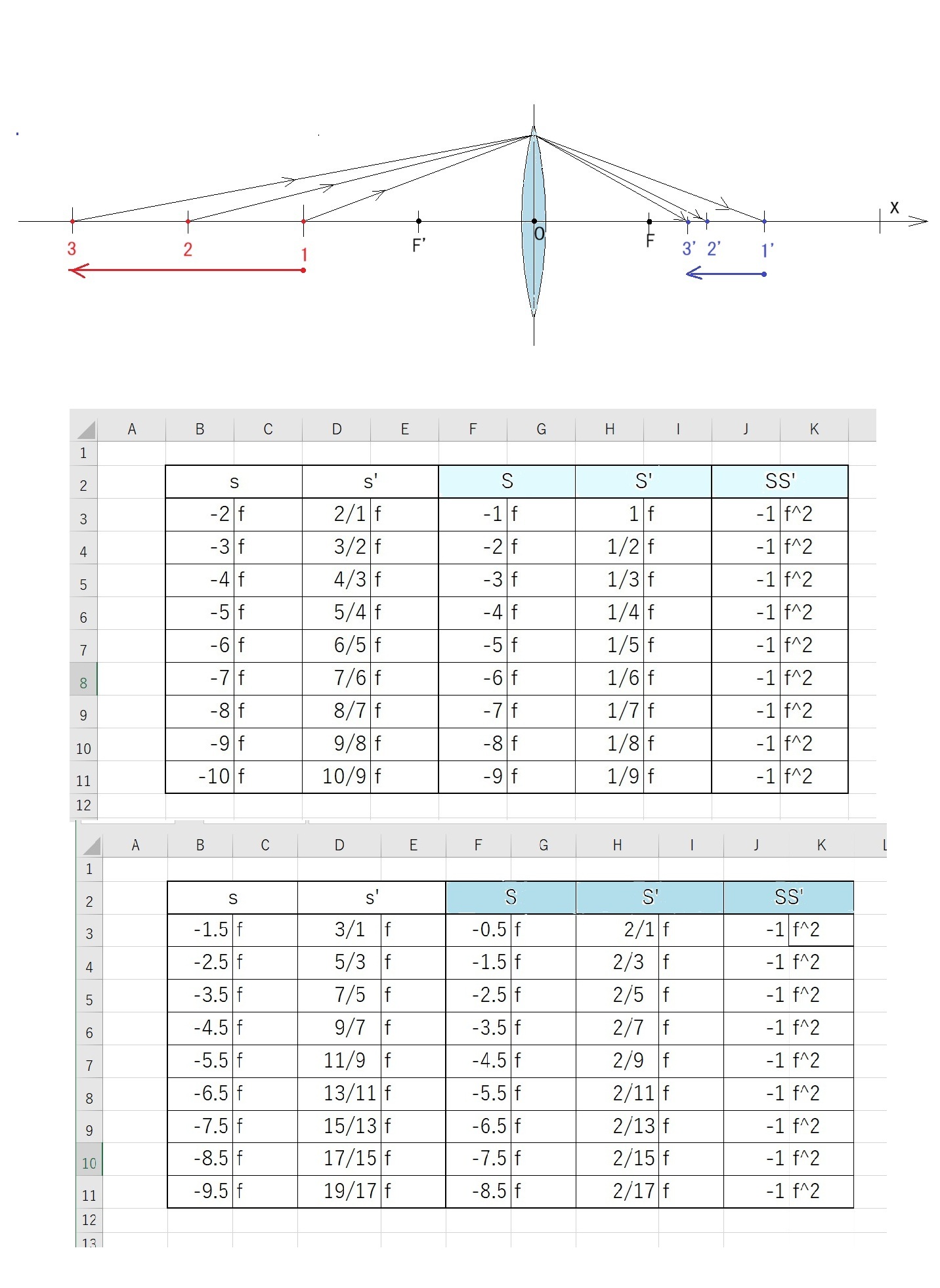
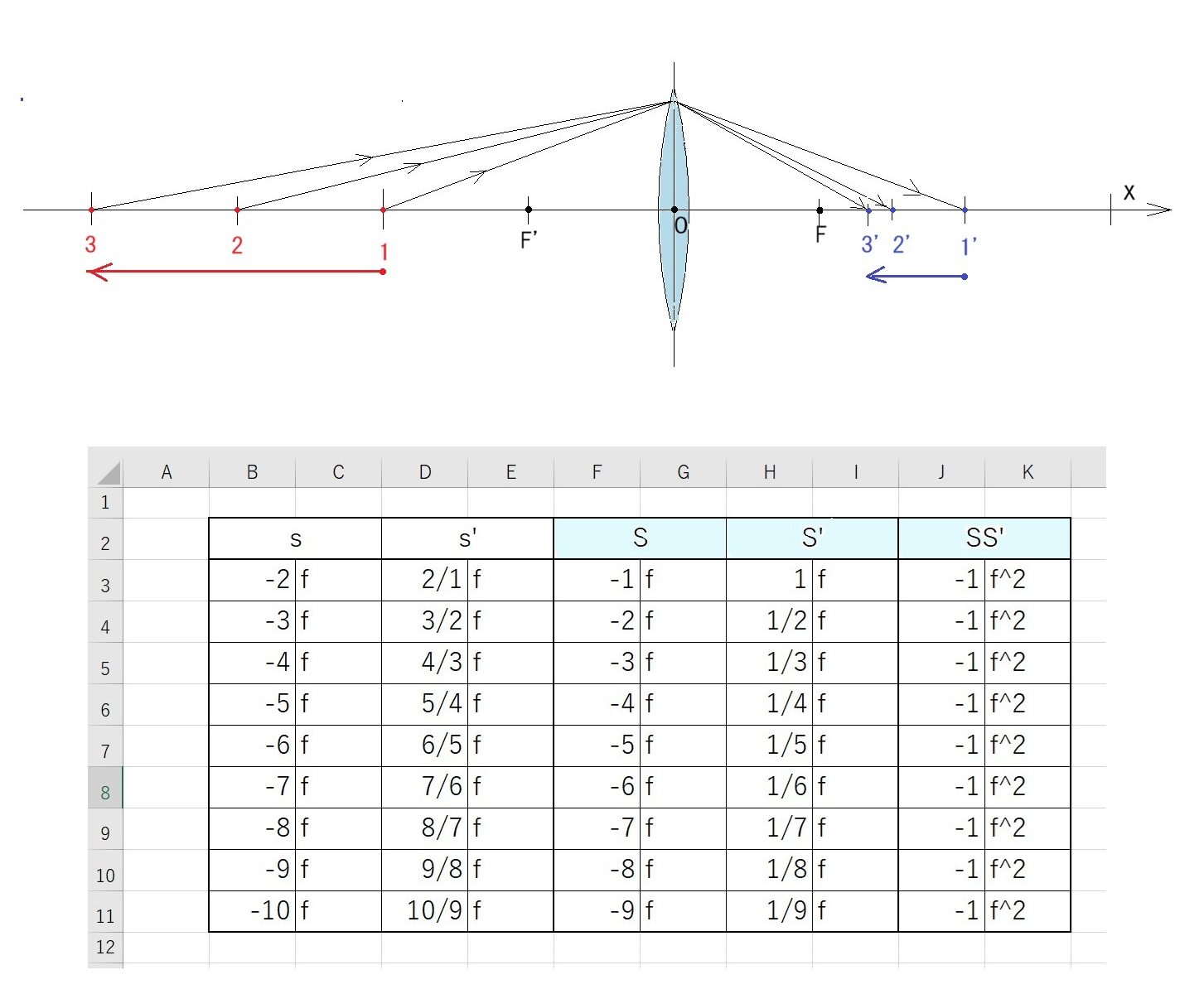
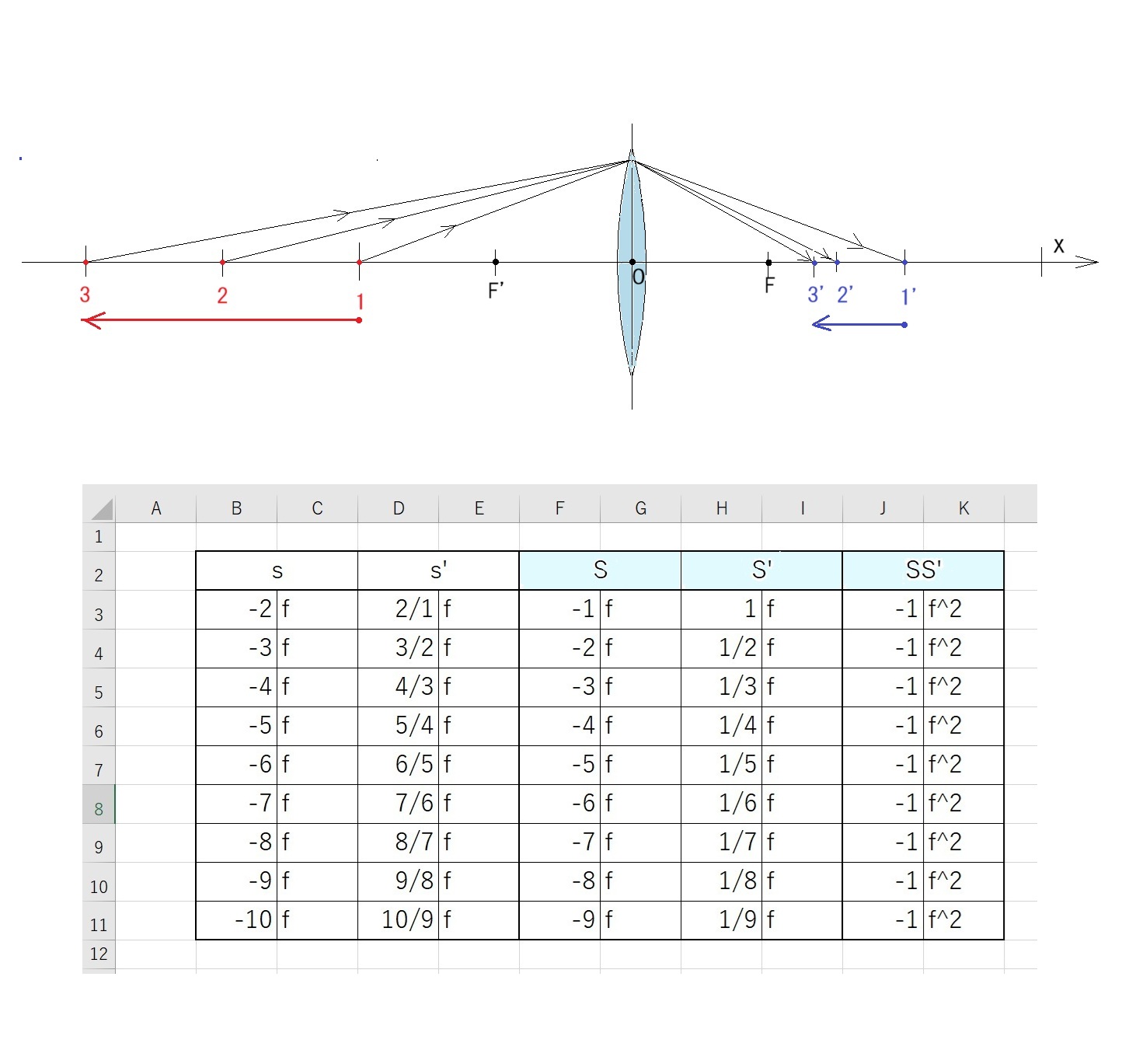
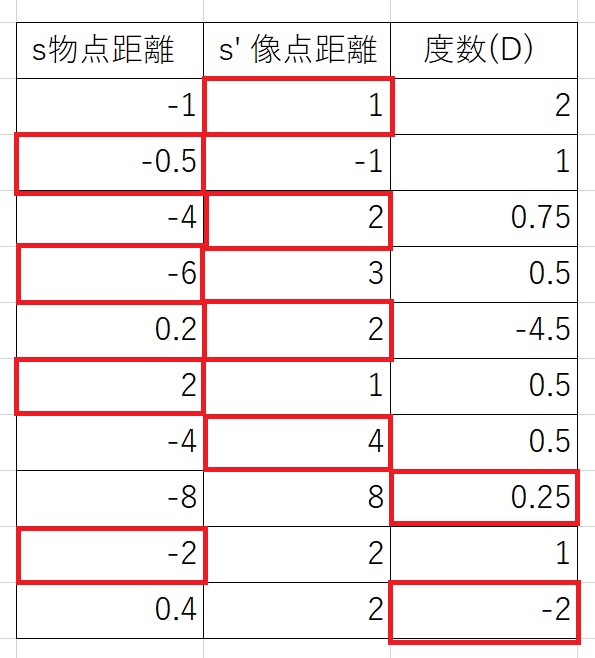
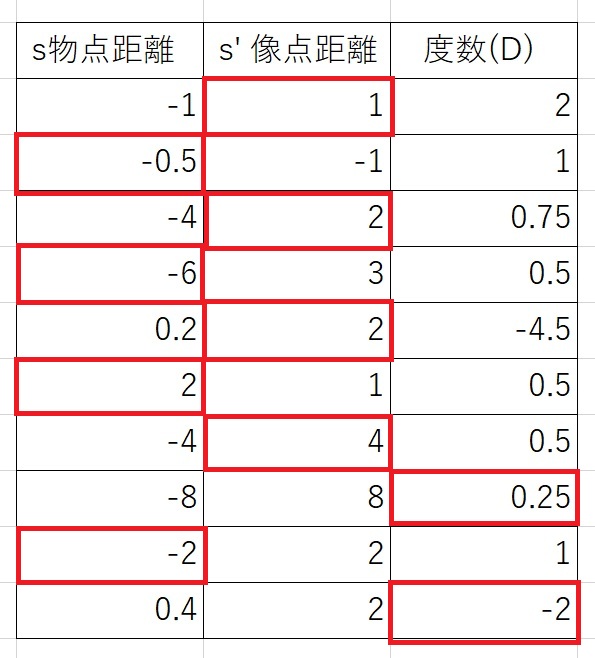
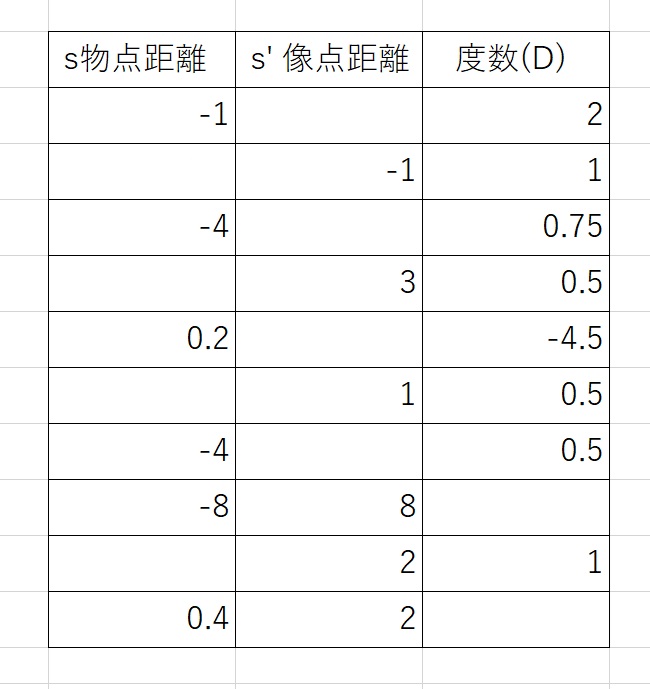
上の表が前回ご紹介した、計算結果で、仮分数出力をしてみたところ、今後は計算がほぼ不要になる法則を発見して狂喜した次第です。(数学が得意な方には、何を今更?と笑われそうですが。)*仮分数 で、実はさきほど作成した下の表は、物点距離を焦点距離の整数倍ではなく、先の表のデータ間の中央を埋めるべく、-0.5f 刻み( s は -1.5f, Sは – 0.5f スタート ) で計算してみた結果の表です。 また、新たな類似の法則が見えて、さらに感激したところです。 s (= n f ) の係数を n と置くと、s’ の係数 n’ = n / (n+1) でした。 ニュートンの公式の場合は、最初からさらにシンプルで、同様に、S (= N f) の係数を N とすると、N N’ = -1 です。(N’ = -1/N ) です。 再三ご説明していますが、一般の公式はレンズ位置基点で物点、像点距離を定義し、ニュートンの公式は、両焦点が基点ですので、 S= s + f ; S’ = s’ – f ; の関係があります。
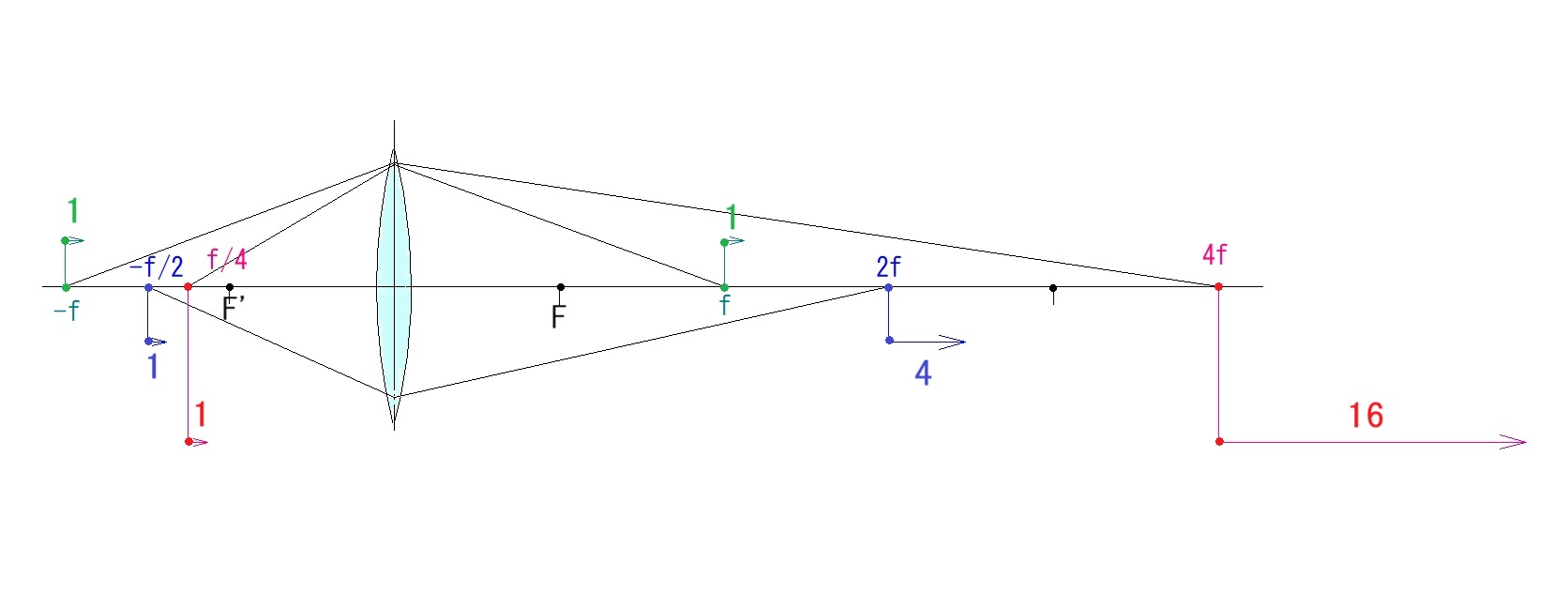
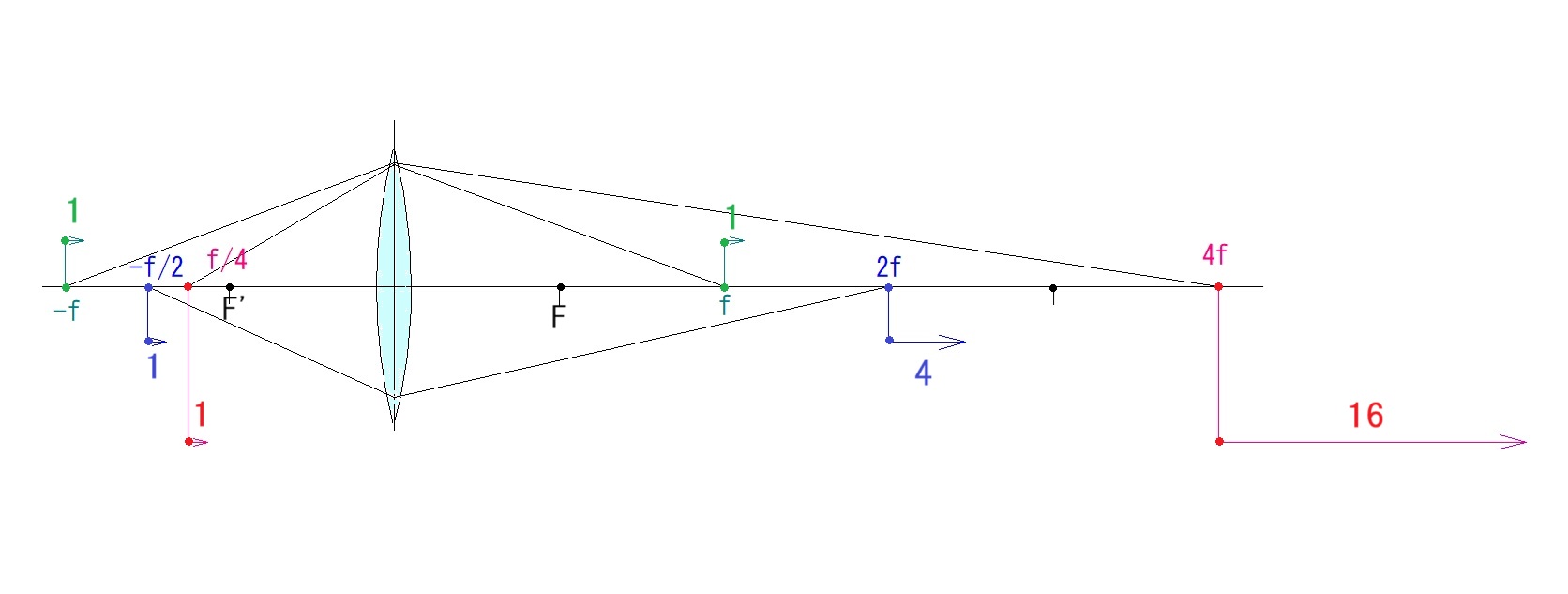
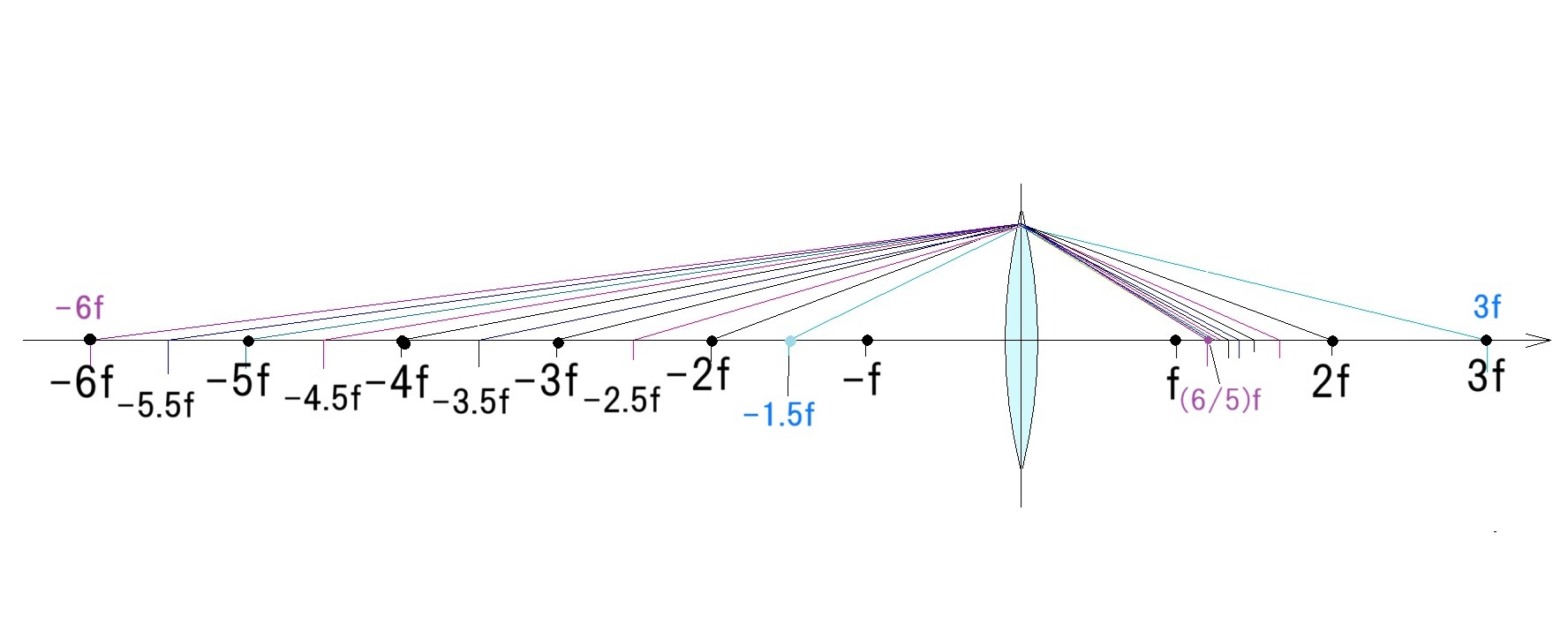
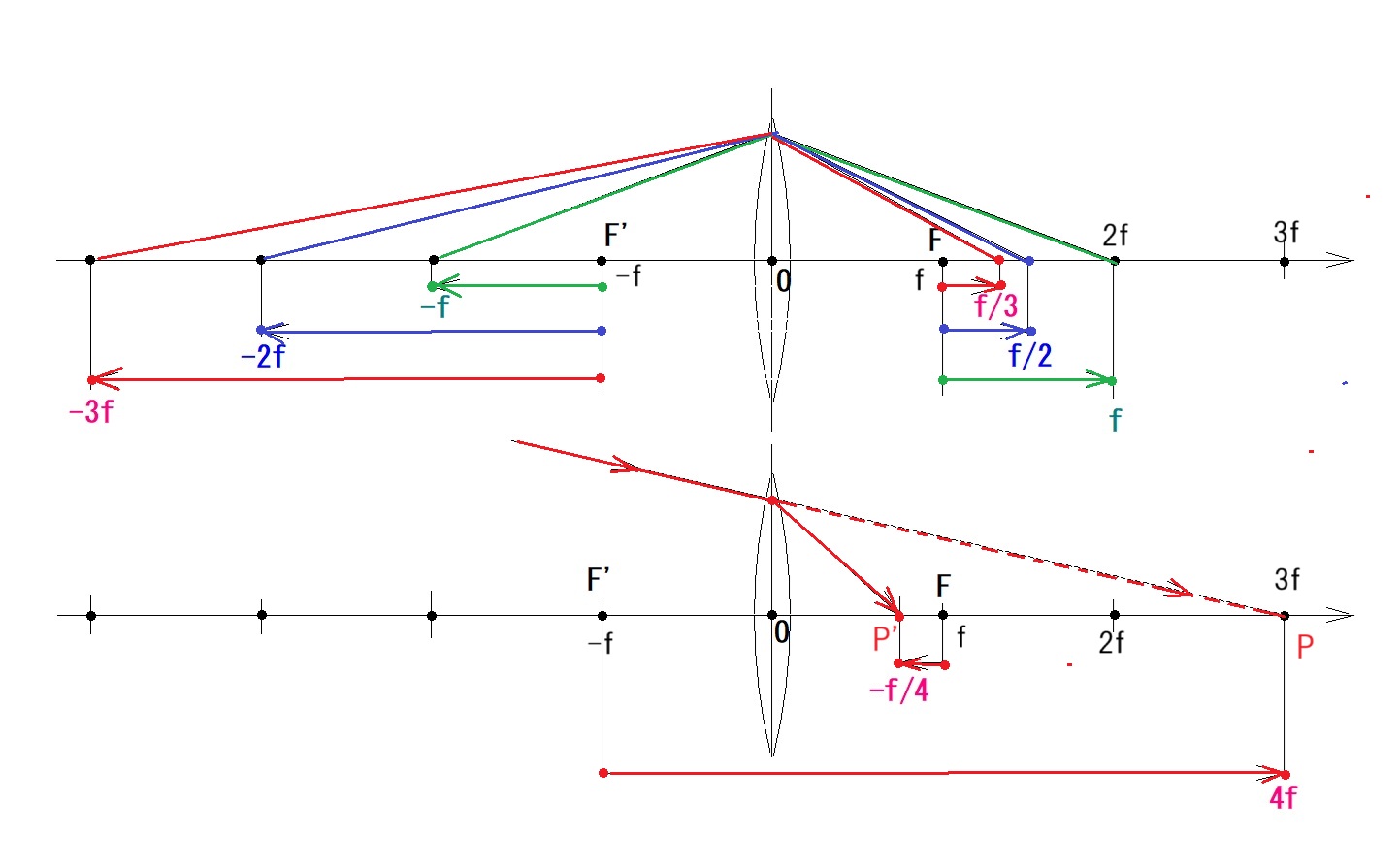
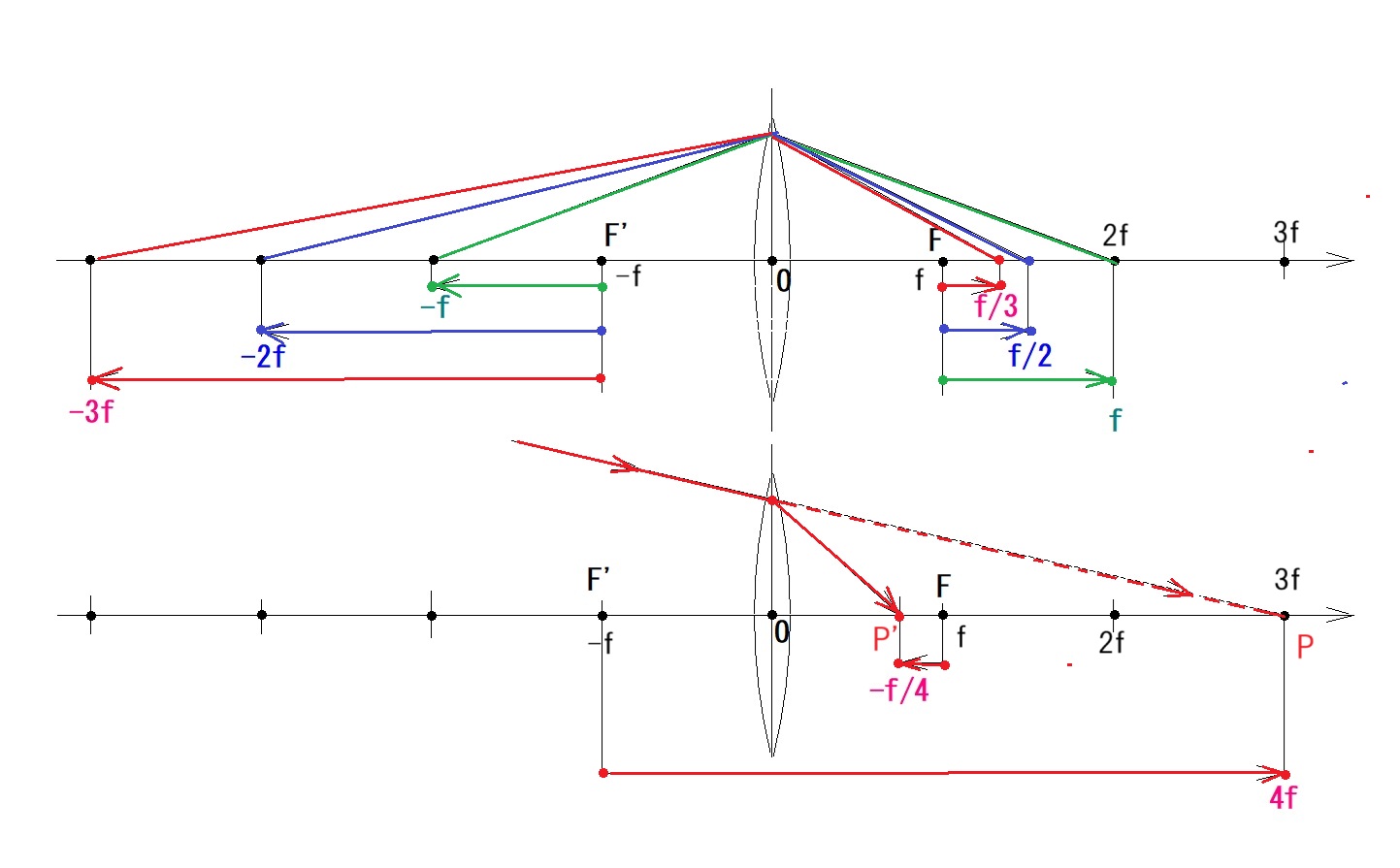
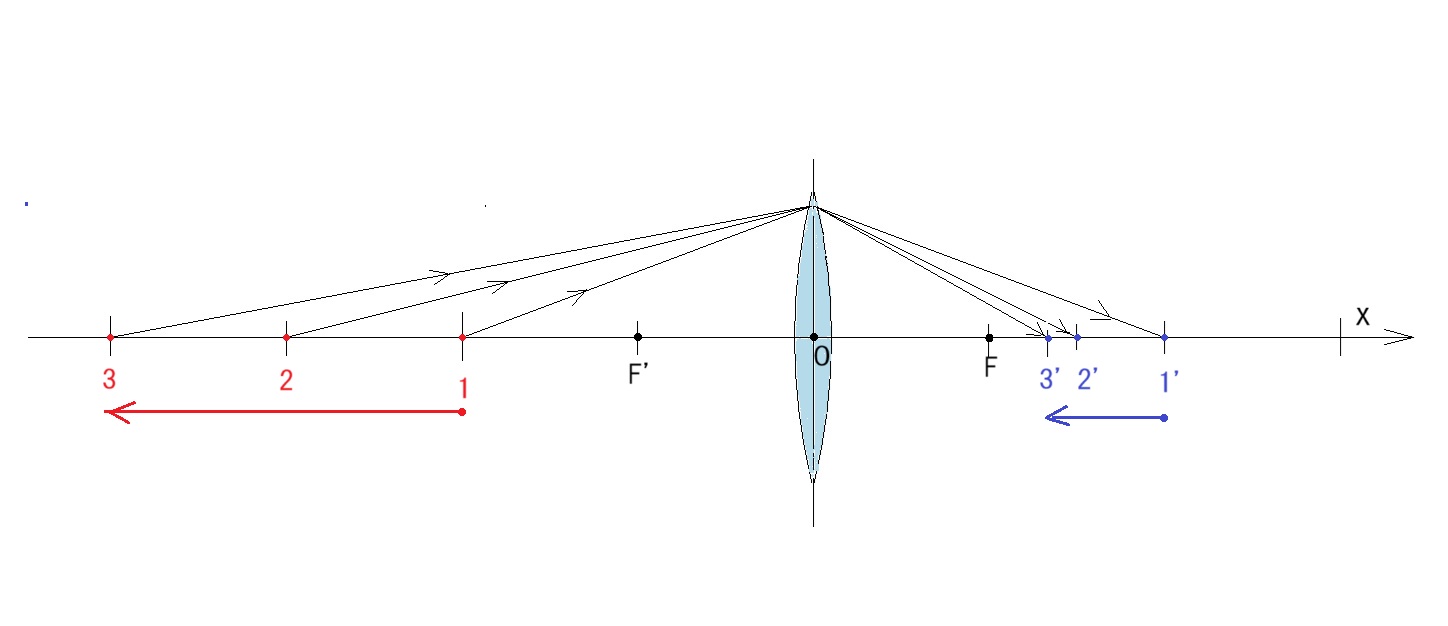
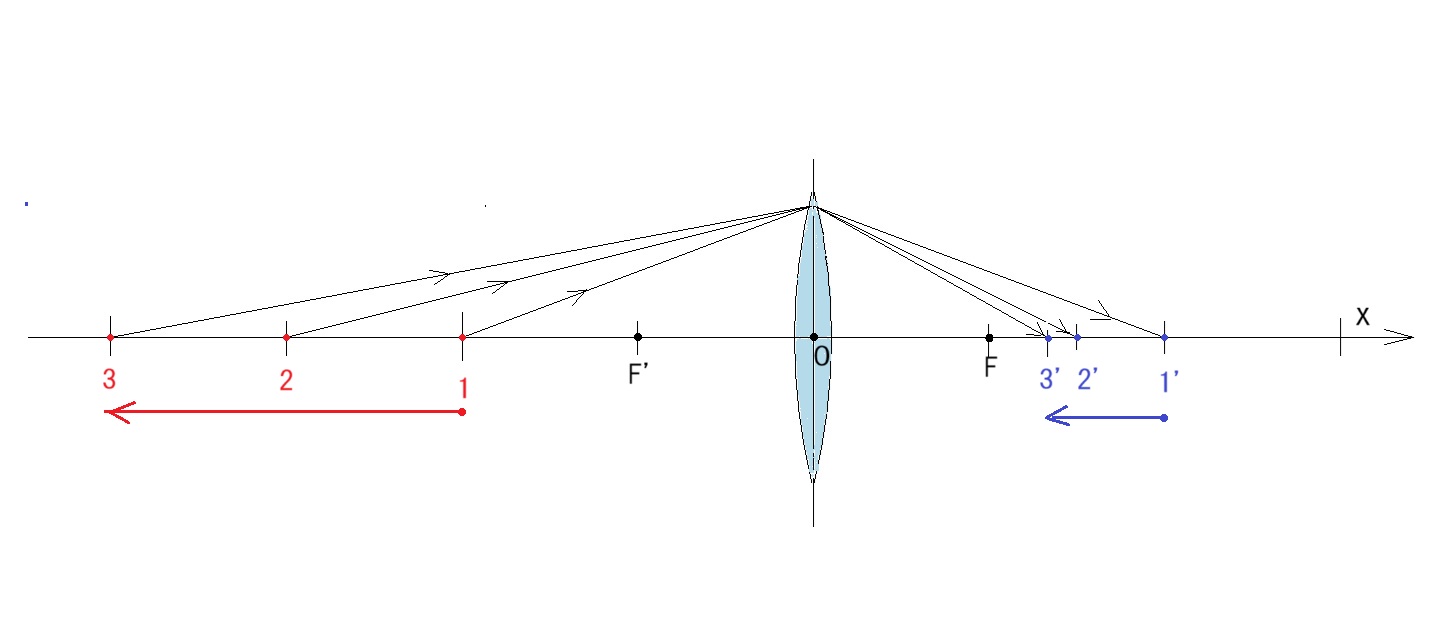
光線が密集していて、全ての光線ペアをマーキングできませんが、出来る限りマークしてみました。
この作図で学べる事ですが;
1.物点が左に向けて -6 f 付近に来ると、像点の左向きの動きが急激に減速し、早くも、さらに物点が左無限遠に行くと、像点が像側焦点に収束する(焦点の定義)ことを予感させますね。
2.逆に、物点が物側焦点に接近すると、像点が急速に右側に逃げて行くことも分かります。物点が物側焦点に来ると、像点は+∞に逃げて行きますが、その傾向がすでに物点 -1.5 f から見え始めていますね。
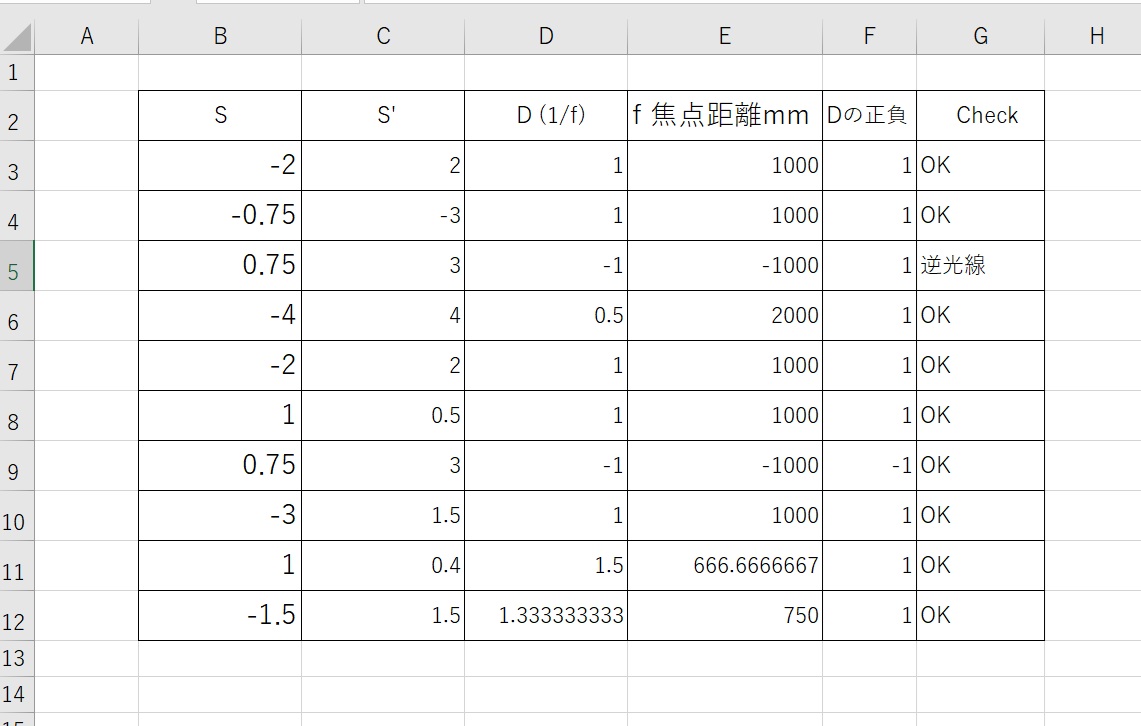
ニュートンの公式 ( SS’= -f^2 ) の結果を、一般的な公式 (1/s – 1/s’ = 1/f) で検算してみました。レンズ基点の一般公式と、焦点基点のニュートンの公式で、同じ文字を使用していて紛らわしいので、ニュートンの方は大文字 ( S, S’ )、一般式の方は小文字 ( s, s’)にしました。( S = s + f , S’ = s – f ) 検算結果は上の表の通りで、当然ながら矛盾はありませんでした。 さらに、表から、非常に興味深い結果が見られました。 D列の s’ の値を敢えて仮分数で出力しました。美しい法則性に溜息が漏れましたが、表を見ていただけば、一目瞭然ですね。
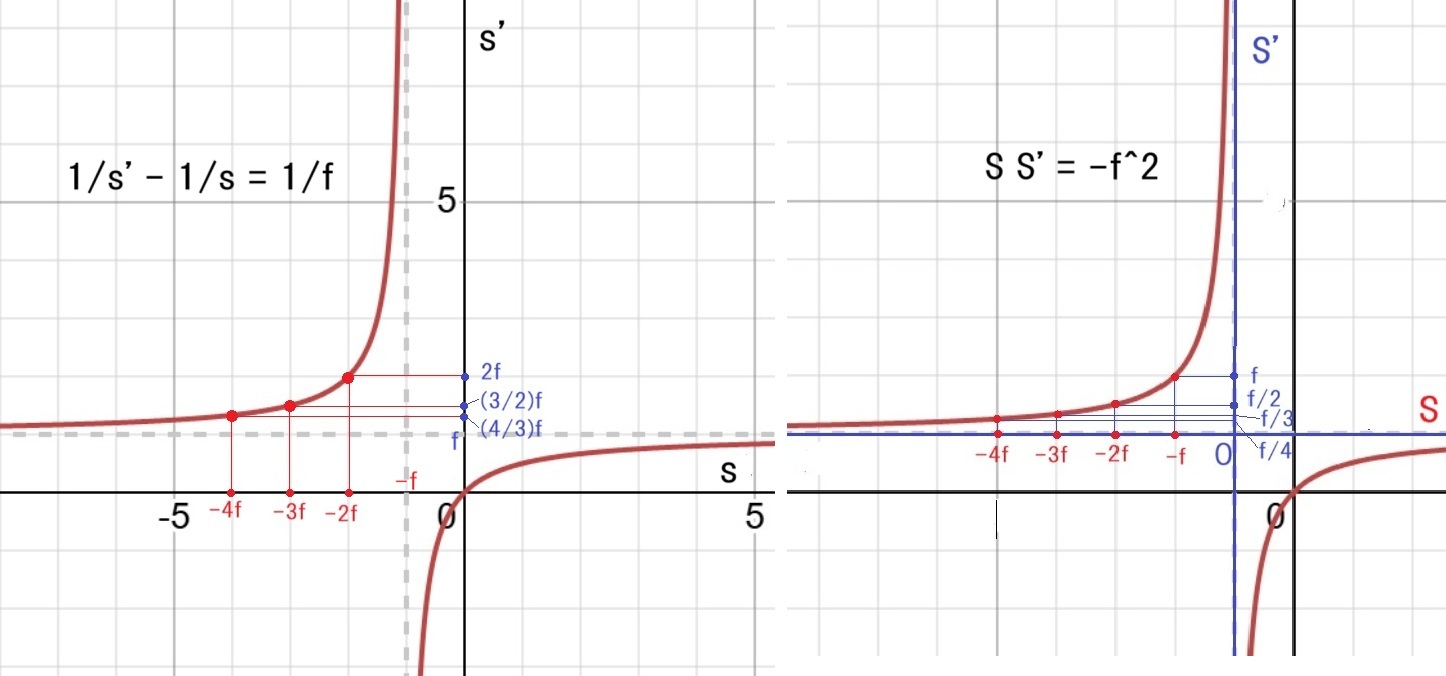
グラフ化してみました。2つの公式で、グラフの曲線は全く同じですね。 標準公式のグラフの座標軸を、x 軸の方向に -f , y 軸の方向に +f 平行移動させると、ニュートンの公式のグラフになりますね。 もともと同じ公式の、基点をずらしただけですから、当然でした。
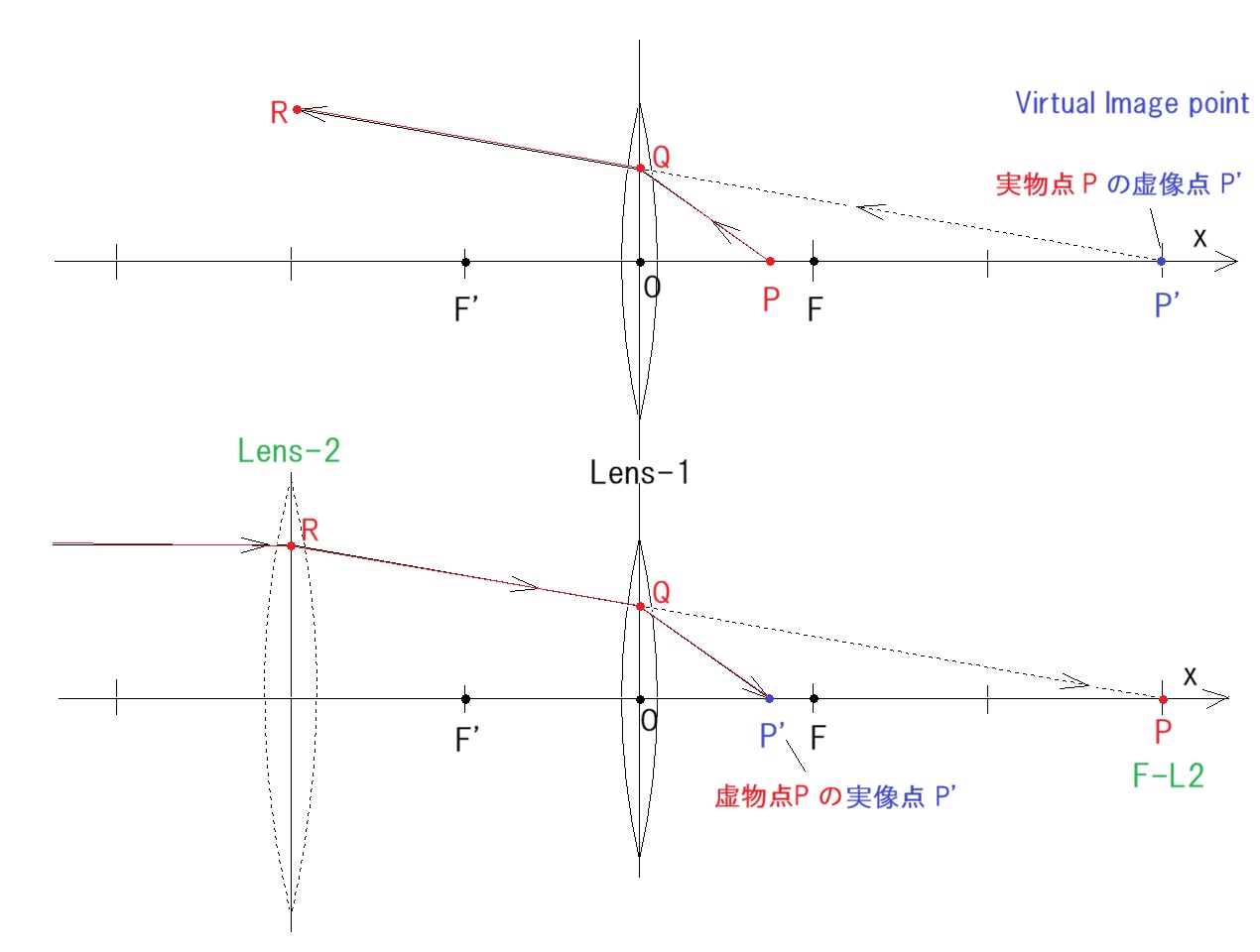
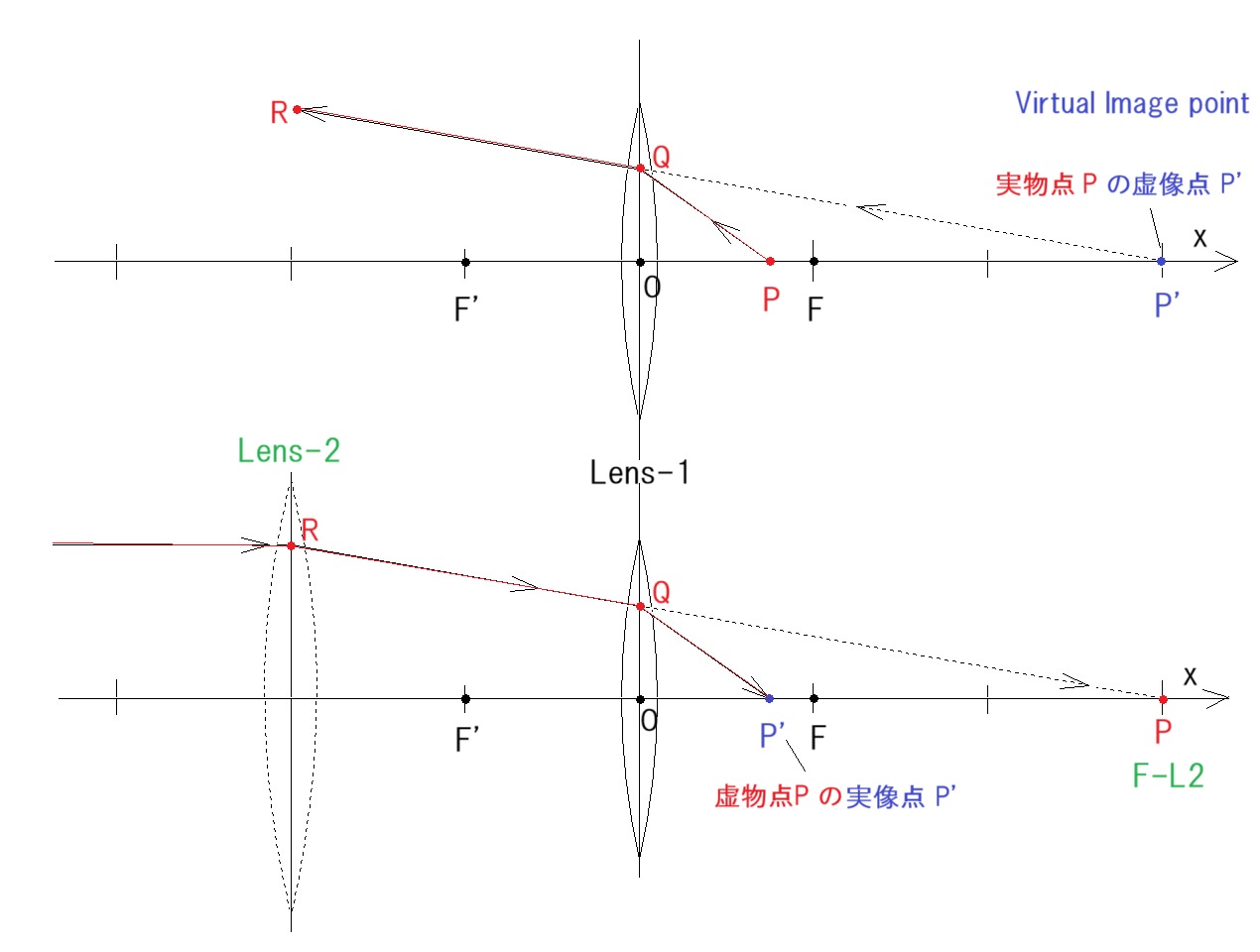
焦点や焦点距離よりも、ずっと難解なのが、像点や、物点の ”虚” の意味のはずなのに、今までに質問して来られた方は何故か皆無でした。 この辺も、初学の方の躓きの原因かも?との思いから、先回りしてご説明します。 まずは、上の図をご覧ください。物点 P が F (Lens-1 の像側焦点) を超えてレンズに接近すると、Q で屈折した光線 QR はX軸のマイナス方向に対して、図のように斜め上に射出するため、X軸のマイナス領域に実像を作ることが出来ず、X軸の+領域の虚の点 P’から発散するように射出します。 つまり、Lens-1 は、実物点 P の虚像点を P’ に結像させるということです。 下の図は、上の図と同じ光線 RQ が逆方向から Lens-1 に投射された場合です。光の逆進の法則から、下の図の例も、上の図と全く同じ経路をたどるため、 物点と像点が交代しています。 つまり、下図では、Lens-1 は虚物点 P の実像点を P’ に結像させているわけです。 自然界には、収斂光束を発生させる物体は存在しませんが、Lens-1 の左に、Lens-2 のような別のレンズ系があれば、こうしたケースはごく普通にあります。下図は、まさしく、天体望遠鏡対物レンズとレデューサーの関係を再現しています。 ただ、どちらも結像の主役は Lens-1 であり、光線RQ が 虚の物点 P に向けて投射されるなら、Lens-2 には意味がなく、何であってもかまいません。 また、本例が示すように、物点と像点は常に立場を逆転させられるため、両点を共役点、両点を含んでx軸と垂直な平面を共役面、と言うわけです。物平面と像平面は、互換関係であり、共役面だということです。
(今回は下図の例との比較のために、上図の光線の向き(左向き)が X 軸の負の方向(通常と逆)になっていますが、このままで結像公式を適用すると、Lens-1 のパワーの符号を反転させない限り、公式が破綻してしまいます。 従って、通常は、光線の向きが x 軸の正方向と合うように、作図も最初から上図とは左右反転して描く( x 軸を反転する。)習慣にするのが無難です。 つまり、レンズに入射する光線の向きがx軸の正方向になるように作図するということ。)