意図的にスルーされている気もしますが、ここで終わるわけには行かないのです。
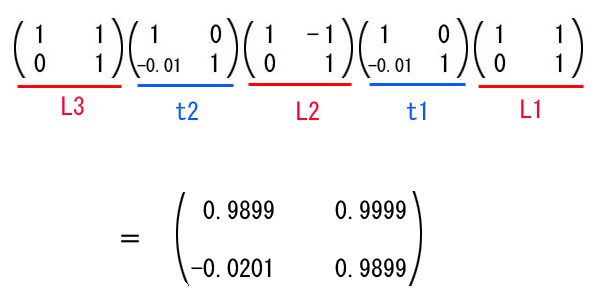
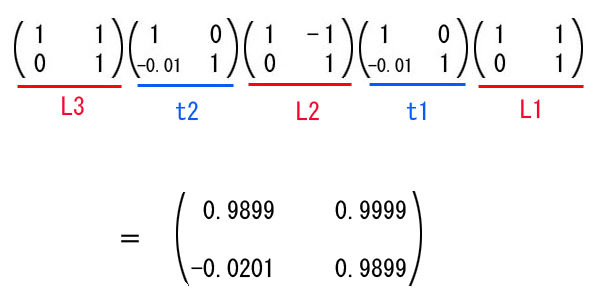
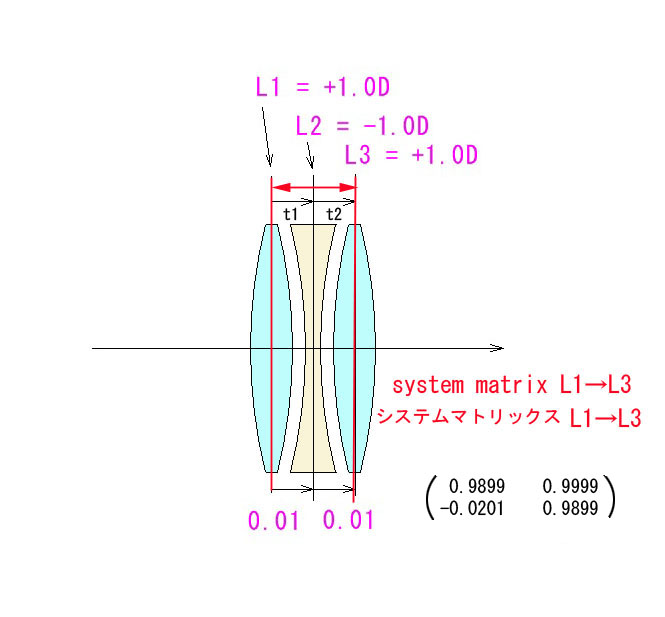
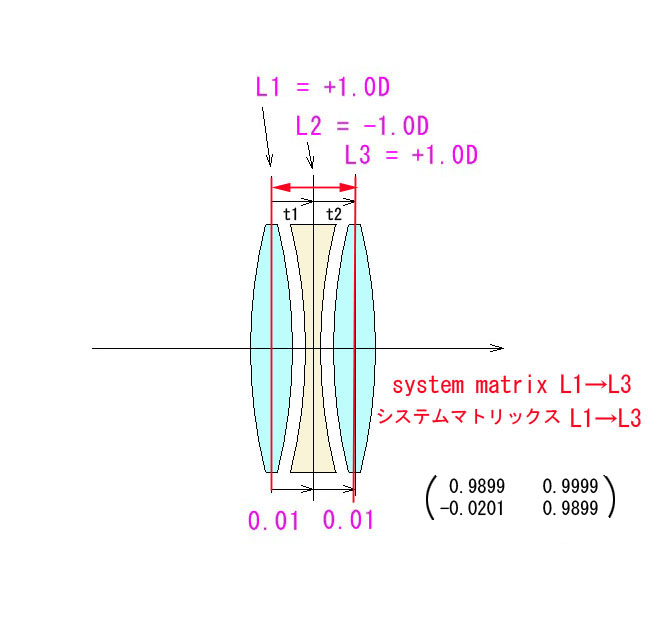
では、求めたシステムマトリックス(図中に記載 ↑)で何が分かるかについてご説明します。
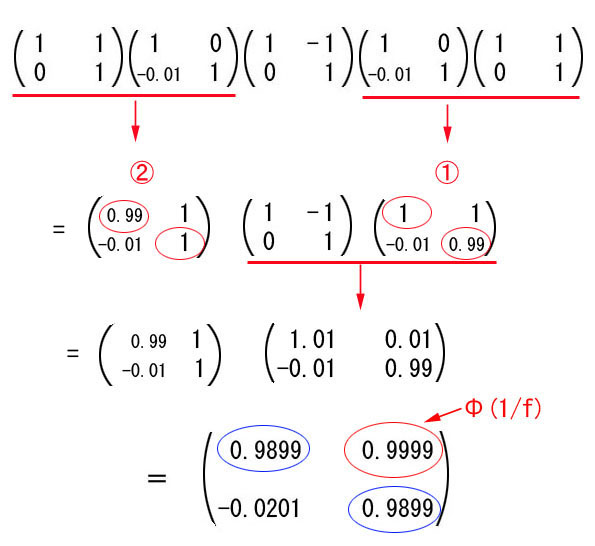
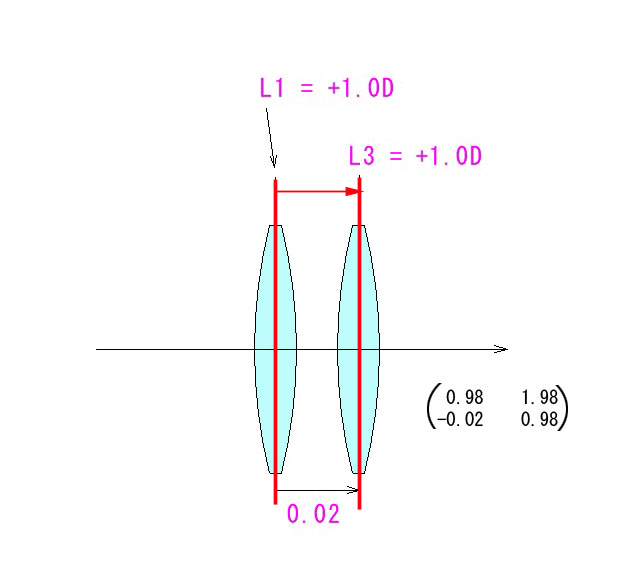
まず、右上の成分 0.9999 から。合成パワー Φ(度数D)=0.9999D なので、
焦点距離=1.0001m (1000.1mm) ( f = 1/Φ )
エレメントの度数に対して、この程度のレンズ間隔だと、合成度数に関しては、ほぼ密着と考えて単純に3枚のレンズの度数を合計したのと、ほとんど変わらないことが分かりますね。
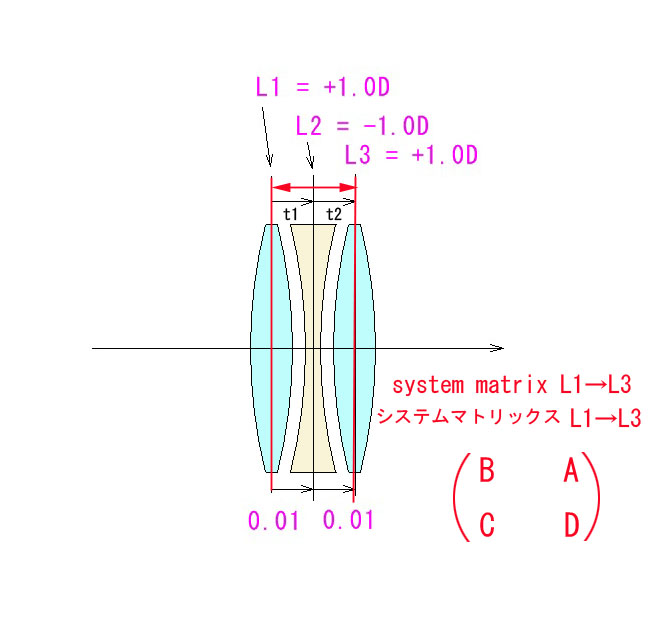
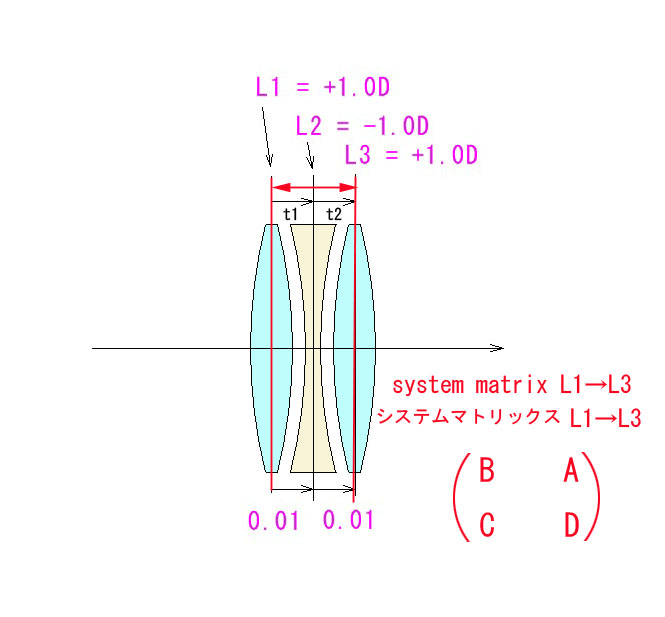
L1 から、+1-1+1=+1 。
次に、主点位置を見てみましょう。
以前にもご説明したように、システムマトリックス、
B A
C D の物側主点 E=(B-1)/A 、像側主点 F=(D-1)/A により、
E = (0.9899 – 1)/0.9999 = – 0.01010101 = F となります。
( – ) が付いているのは、レンズ面よりも主点が中側にあることを意味します。
ミリで言うと、約10mmレンズ系内に入った所なので、ほぼレンズ系の中央に、物側、像側の主点が位置していることになります。L2の凹レンズの中心ですね。
では、次に、中央の凹レンズ L2 を除去したレンズ系のシステムマトリックス(図中 ↓ に示しました。)を見てみましょう。(各自で行列式を立てて計算してみてくださいね。)
こちらの物側主点 E 、像側主点 F は、
E = (0.98 – 1)/1.98 = – 0.01010101 = F
となり、何と、前問と全く同じ数値が出るではないですか!
このように、完全シンメトリックな3枚玉の中央のレンズを除去しても、主点の位置は変わりません。
合成度数=1.98Dで、+1.0Dのレンズを2枚、20mm開けて配置したために、密着時の+2.0Dよりも度数がわずかに弱まりましたね。焦点距離では約 505mm。5mmほど長くなりました。
このように、システムマトリックスを見ると、その光学系の顔が見えてくる。
面白くないですか??
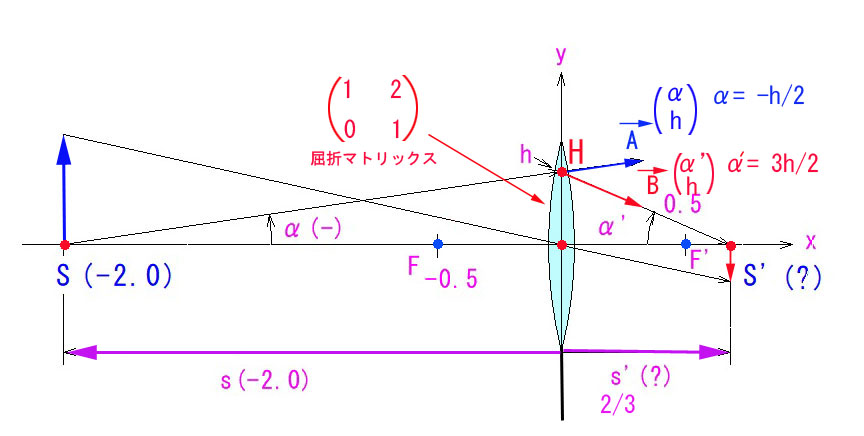
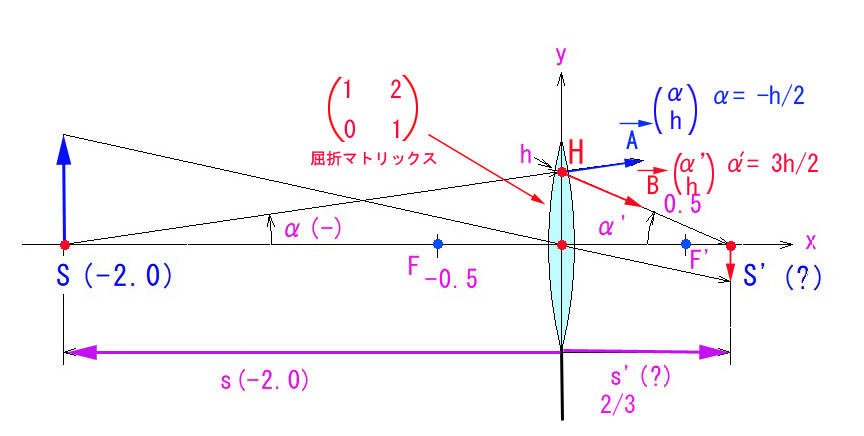
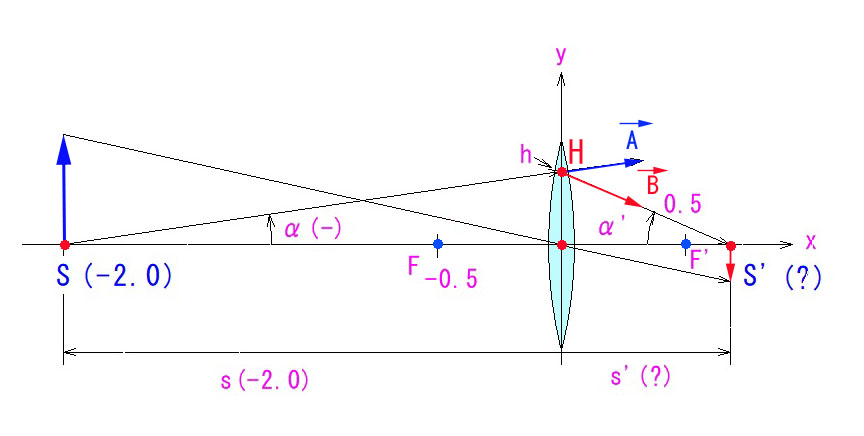
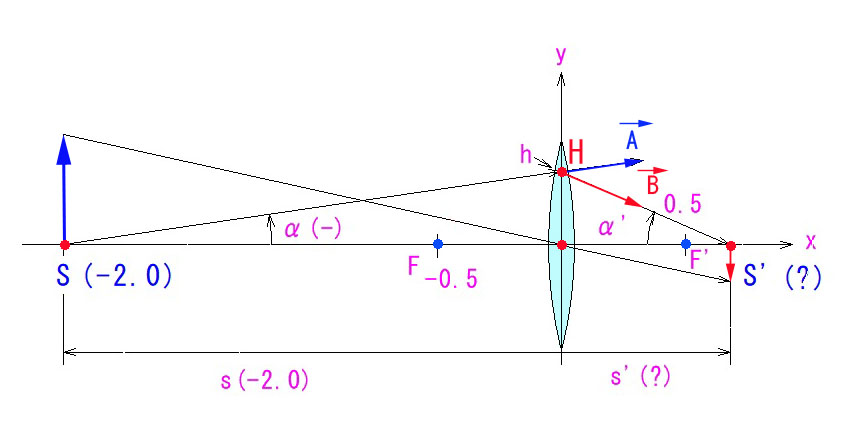
次に、元の3枚玉のシステムに、左から光軸に平行で、高さ h=1 の光線を投入してみましょう。
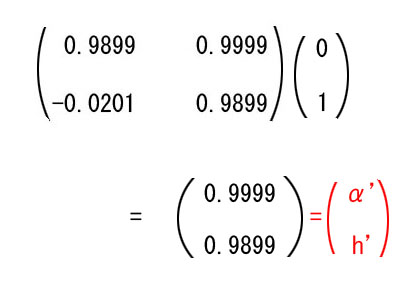
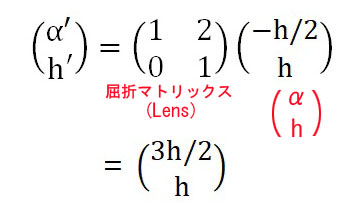
計算の約束上、左から投入する光線の行列は、システムマトリックスの右側に配置することになります。
α=0 で、h=1 の入射光線です。
それを計算すると、α’ = 0.9999 , h’ = 0.9899 となります。
これが何を意味するかと言うと、
L1面に高さ h=1 で投入された光線が、L3面上の高さh’ =0.9899の点から、傾斜角α’ = 0.9999の角度で射出するということです。
最終面L3とその結像点(焦点)までの距離 s’ =h’/α’ だから、
s’ = 0.9899/0.9999 = 0.989999 (m) となるわけです。
さきほど求めた焦点距離より10mmほど短いですが、これは、焦点距離ではなく、像側の頂点距離で、焦点からL3面までの距離です。
これに、像側主点までの距離を加えたのが焦点距離ですから、今までの計算結果と合致しますね。
(*投入する光線の h の初期値には制限はありません。途中で尺度を変えない限り、x 軸の尺度と統一する必要はありません。(理由は前の講座を辿っていただくと見つかります。))