正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
Dear clients, Please always keep in touch with this Progress-Corner so that we will not have any misunderstandings with each other. And please always keep in touch with the Tracking Site after I shipped the package, so that you will not be absent at the delivery. Never go travel after the package is shipped from Japan.
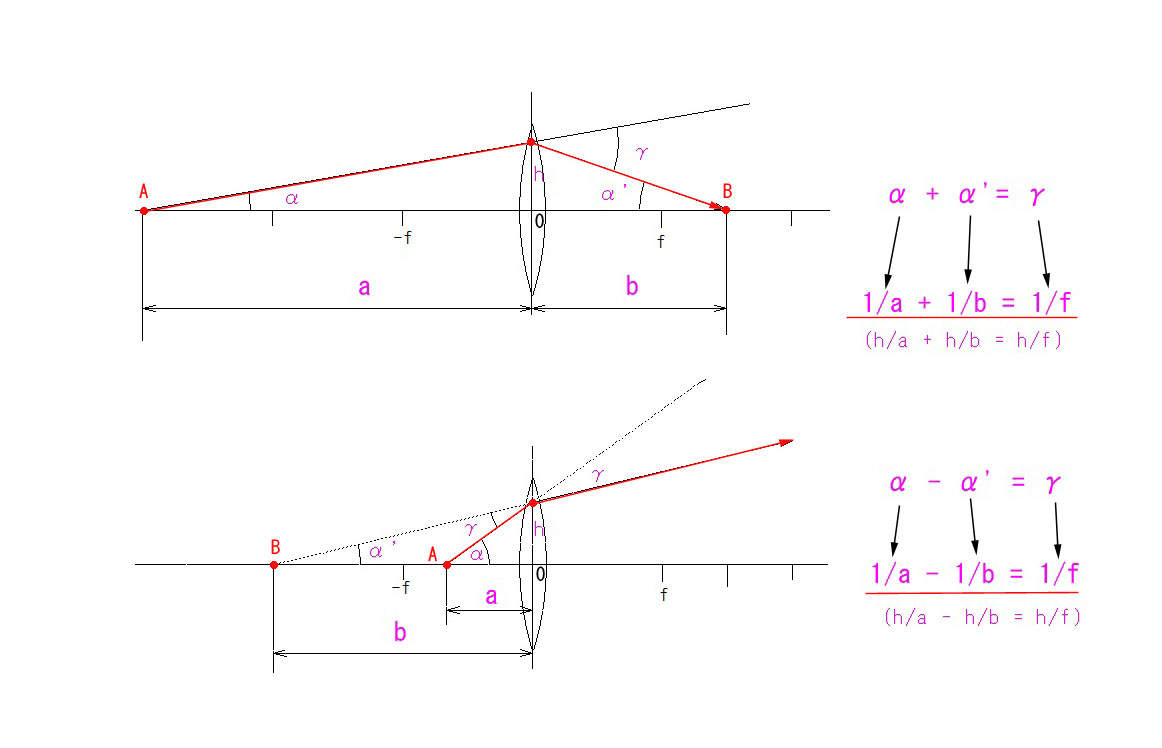
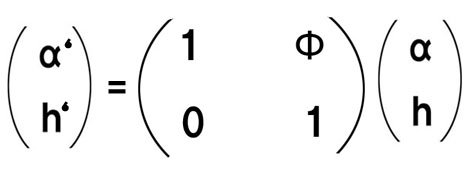
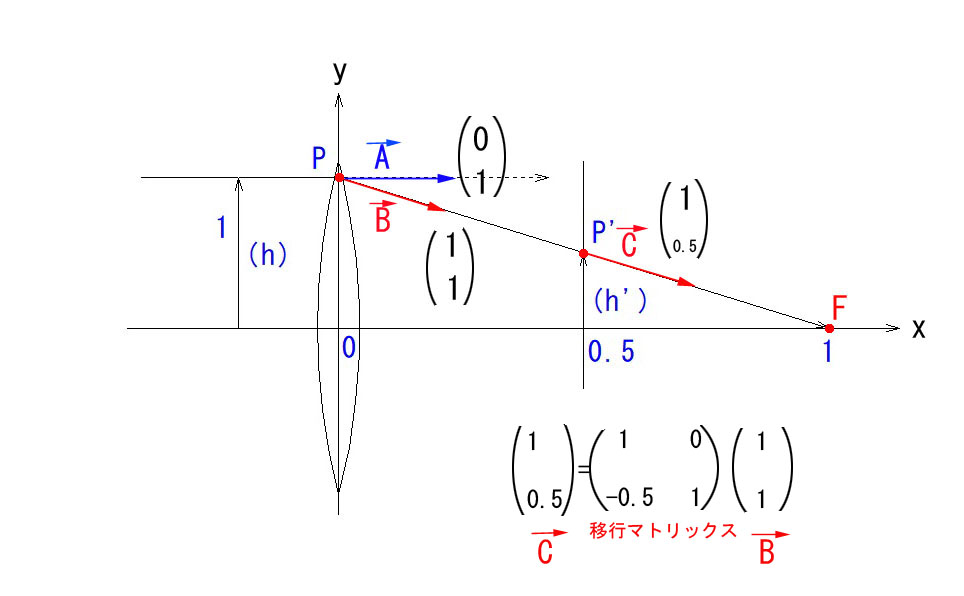
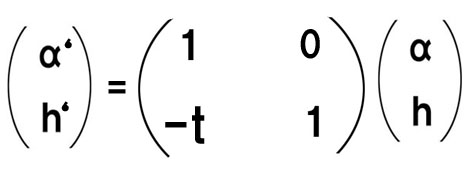
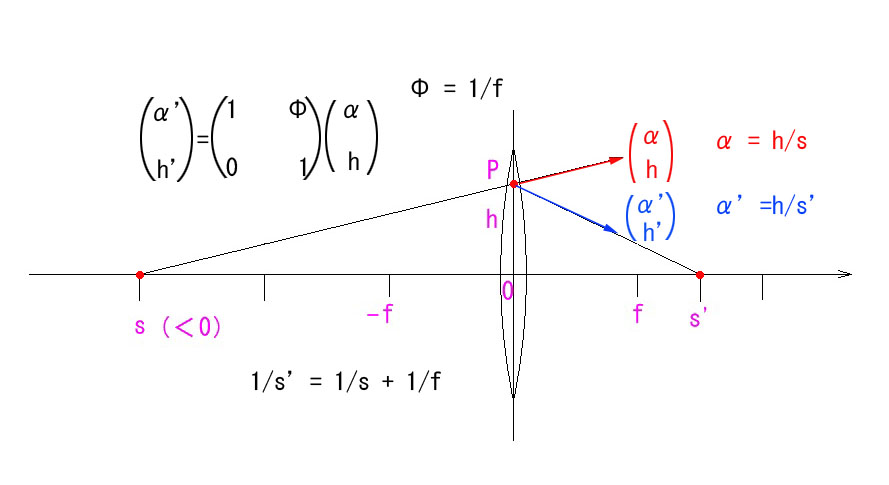
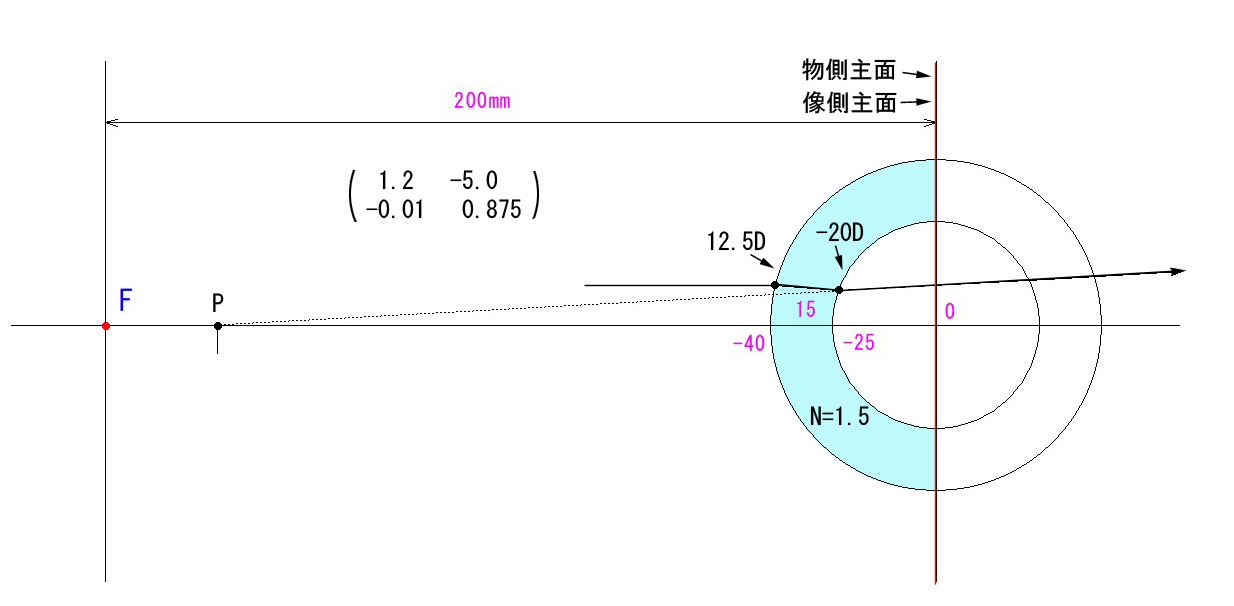
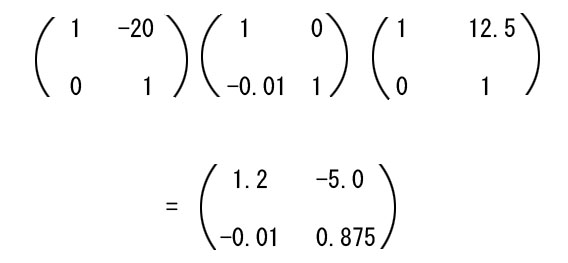
行列方式の利点は、屈折マトリックスと移行マトリックスを無制限に連結、掛け合わせることが出来ることです。一般的な結像公式は、1/s’ を求めても、次のレンズによる1/s” を求めるには、一旦逆数の s’ を求めた後、さらに面間隔を差し引いてから新たな s を設定しないといけないので、連続して運用するのにかかる手間が著しいのです。