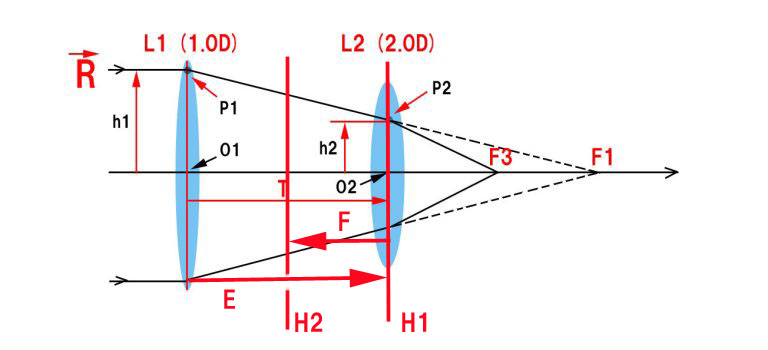
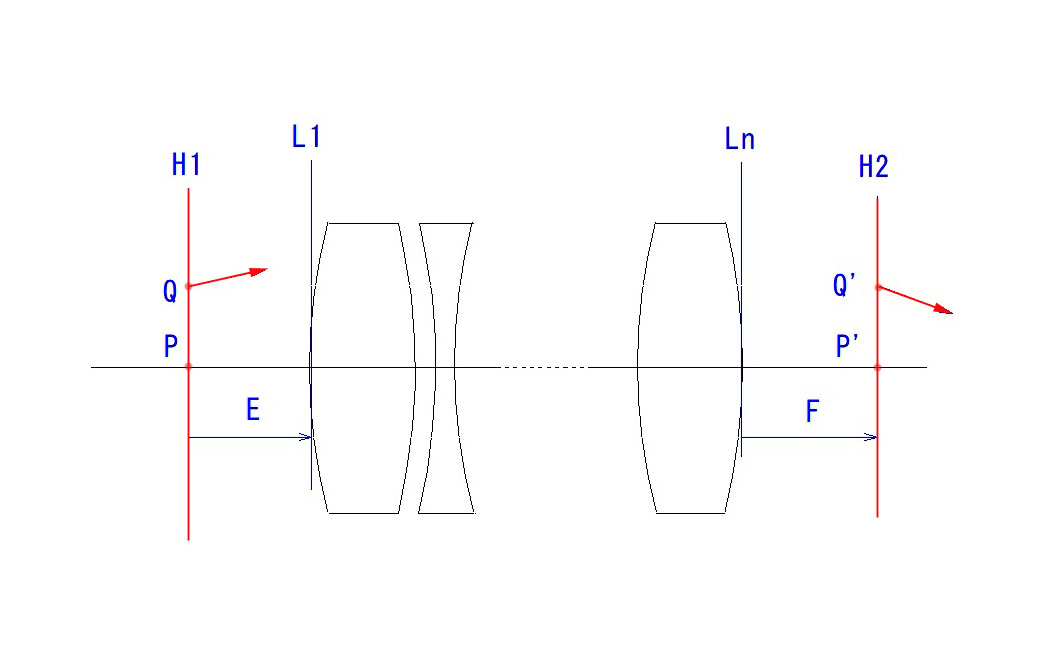
では、講座-2の実例に則して、物側、像側の主点(主面)を調べてみましょう。
両レンズの度数は図示した通り、間隔=0.5mです。
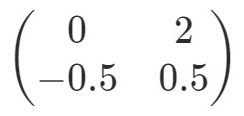
L1~L2のシステムマトリックスです。↑
これに、E=(B-1)/A; F=(D-1)/A を当てはめます。
すると、E= ー0.5; F=ー0.25 と出ます。
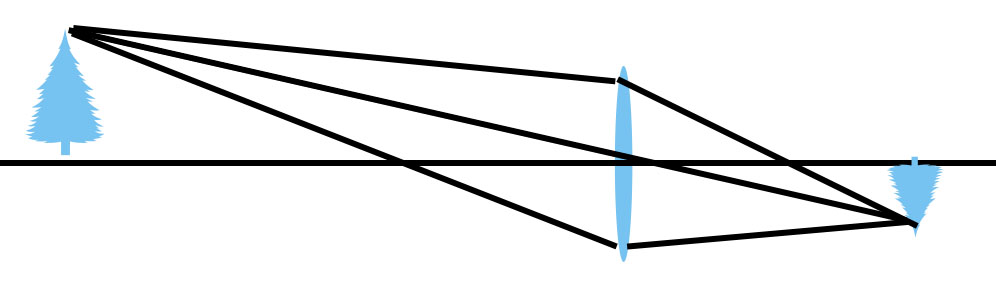
E,Fの両方共負数になったため、どりらも上図で想定した位置とは逆側にあることが分かります。
最初の図に戻っていただくと、明瞭になります。物側主面が第2レンズと合致しました。
像側主面の方が左に来ています。

Innovation of Astronomical Telescope
正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.

では、講座-2の実例に則して、物側、像側の主点(主面)を調べてみましょう。
両レンズの度数は図示した通り、間隔=0.5mです。
L1~L2のシステムマトリックスです。↑
これに、E=(B-1)/A; F=(D-1)/A を当てはめます。
すると、E= ー0.5; F=ー0.25 と出ます。
E,Fの両方共負数になったため、どりらも上図で想定した位置とは逆側にあることが分かります。
最初の図に戻っていただくと、明瞭になります。物側主面が第2レンズと合致しました。
像側主面の方が左に来ています。


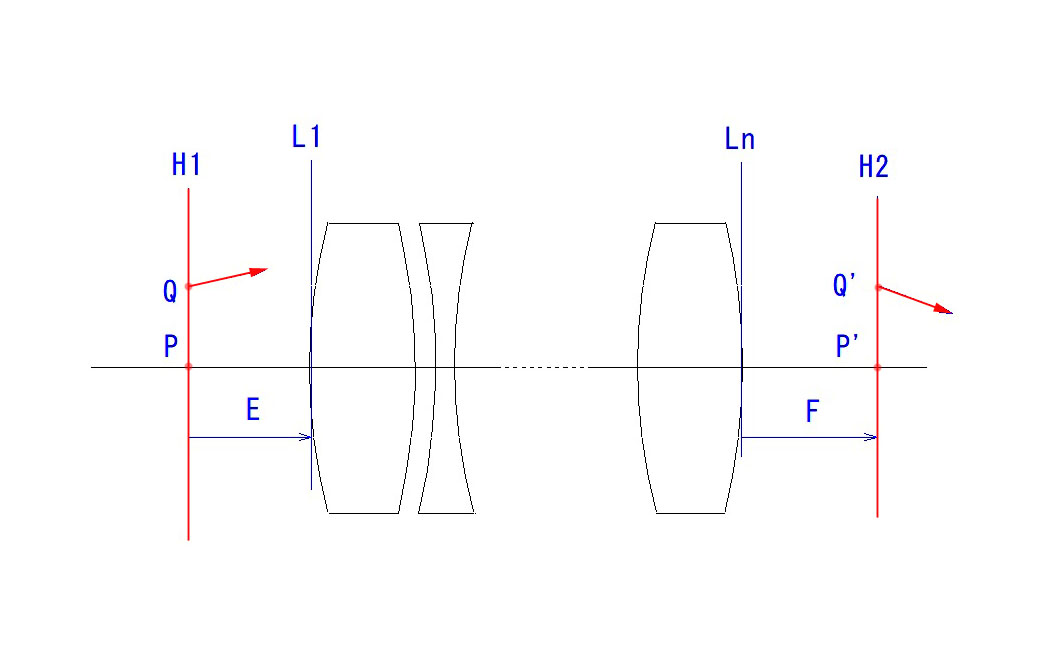
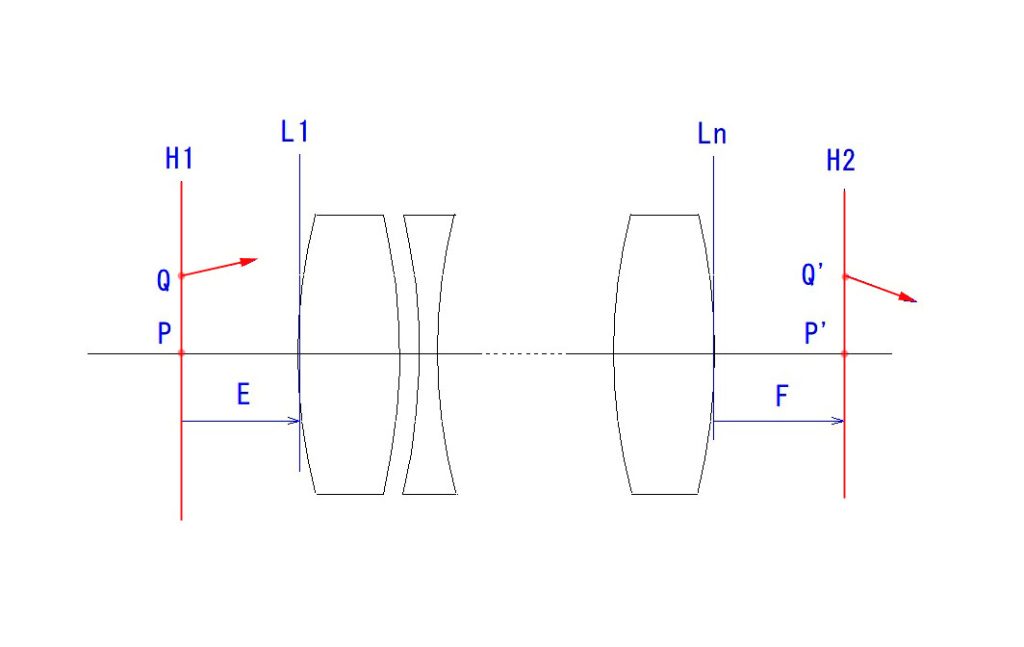
主点(主面)位置を図のように仮に設定します。実際の位置とは関係ありません。E,Fの算出後の正負で最終的に位置が決まります。この図に基いてH1,H2を基準にしたシステムマトリックスを考えると、以下のようになります。

中央の行列は、L1~Lnまでのシステムマトリックスです。各要素を特定していないので、具体的な数値は決まりませんが、上のように、反時計回りにABCDとしておきます。右上の成分Aが常にシステムのパワーとなっていることは以前にご説明した通りです。さらに、BD-AC=1であることは、全ての要素行列で共通です。

計算結果です。↑
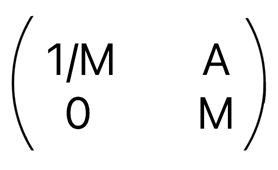
ところで、一般的に、物平面と像平面を基点にしたシステムマトリックス(物像マトリックス)は、上の一般式になることが分かっています。Mは横倍率です。h’=Mhが成り立つためには、左下の成分は常に0になりますし、行列式の値は常に1ですから、対角成分=1/Mになるわけです。
H1とH2は、横倍率=+1になる物像平面ですから、M=1 を代入すれば、主点位置である E,F が算出できることになります。
B-AE=D-AF=1 から、
E=(B-1)/A ; F=(D-1)/A となるわけです。
(AEF-BF+C-DE=0)
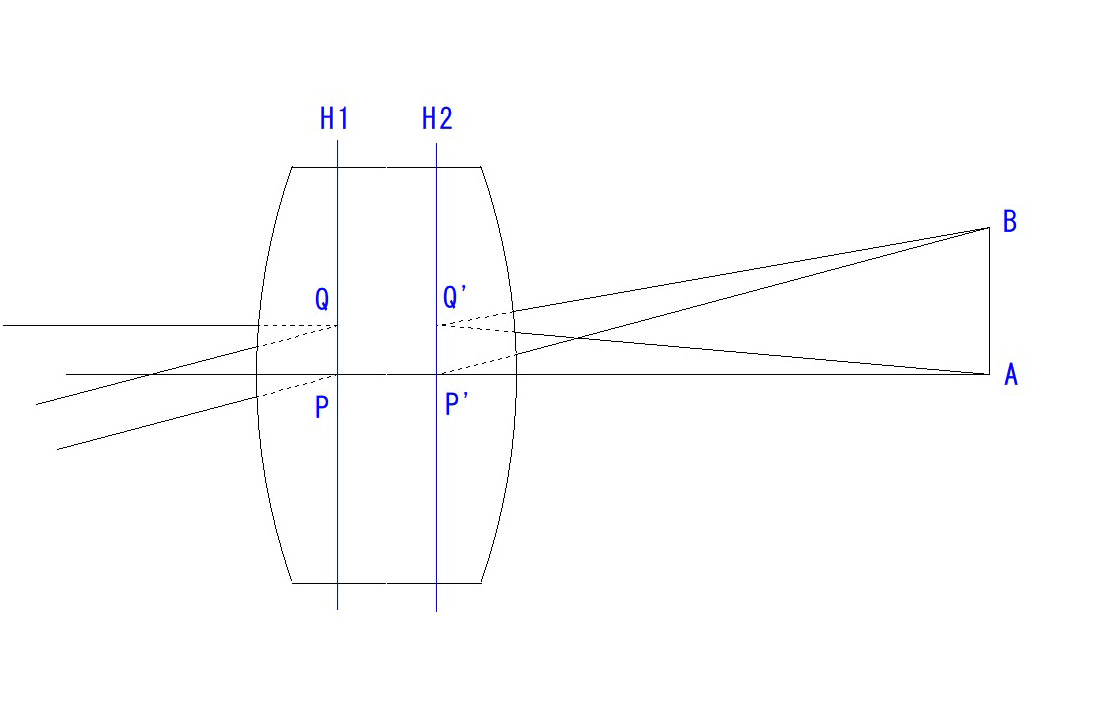
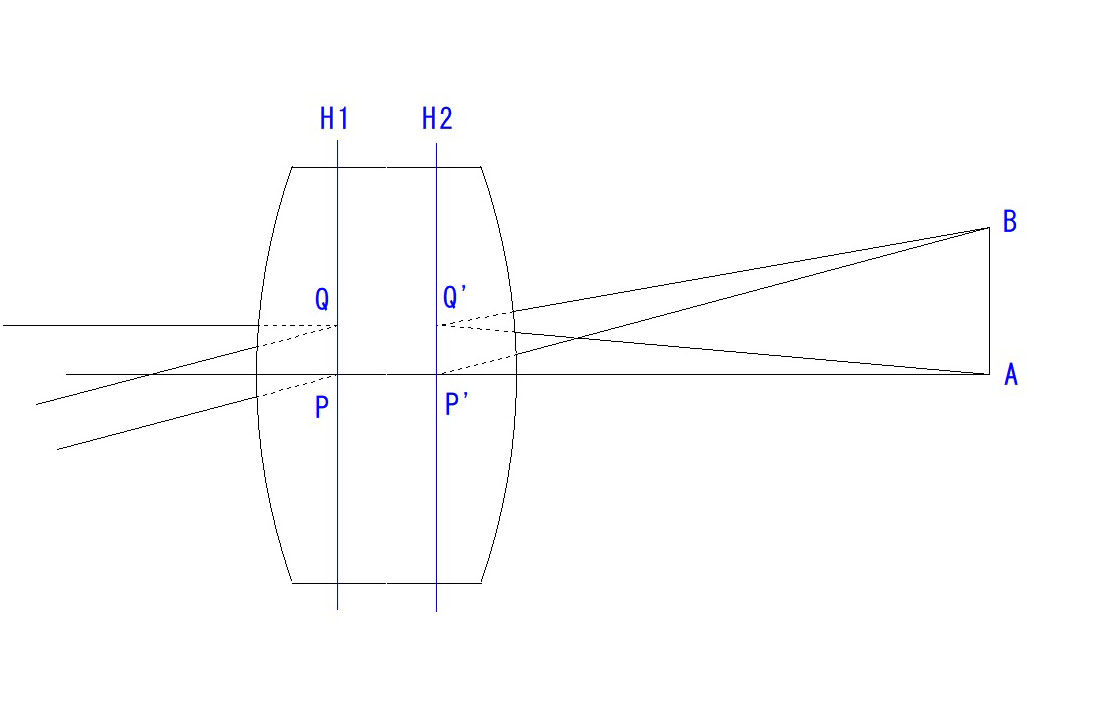
図では、H1が物側主面、H2が像側主面です。
定義は実にシンプルで、「横倍率=+1の共役面が、H1,H2」 ということです。
初心者の方はこの辺から躓くはずです。私も当初、理解に苦しんだからです。
横倍率と聞いて、初心者が描く、物と像のイメ―ジは下図のように、実物と実像の関係しかないからです。この際、これを忘れていただく必要があります。
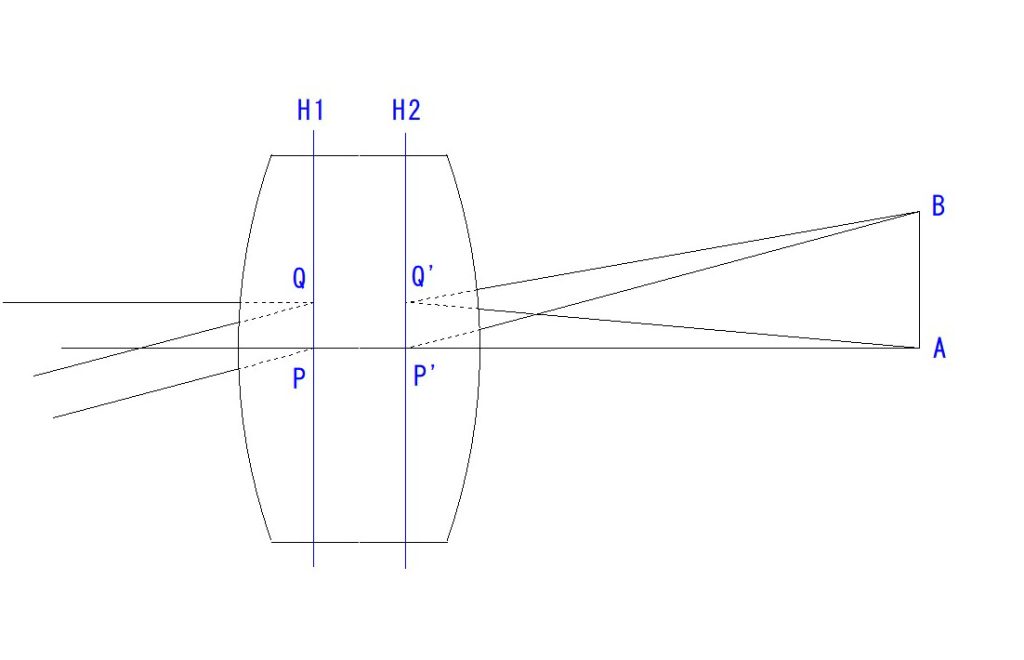
「物側主面のどの高さにある虚物点Qも、同じ高さの像側主面のQ’にその虚像点を生じる。」
ということ。そうした1対の共役面(H1,H2)がどんな光学系にも存在しますよ、ということです。
そして、どんな分厚い光学系も、主面を基準にすれば、薄い単レンズの近軸結像公式が適用できるということです。
そして、2行2列の物像マトリックスから、P,P’の位置がいとも簡単に算出できます。
以前にもご説明しましたが、H1,H2は本例のようにレンズ内にあるとは限らず、また、並び順も逆転することも少なくありません。
解析をする際には、見やすい(考えやすい)ように、H1が第1面の手前(左)、H2が最終面の後ろ(右)に来るように作図(イメージ)し、算出結果の数値の正負から実際の主点の位置を把握するわけです。
準備運動1,2が終わったところで、近軸結像公式を導いてみましょう。
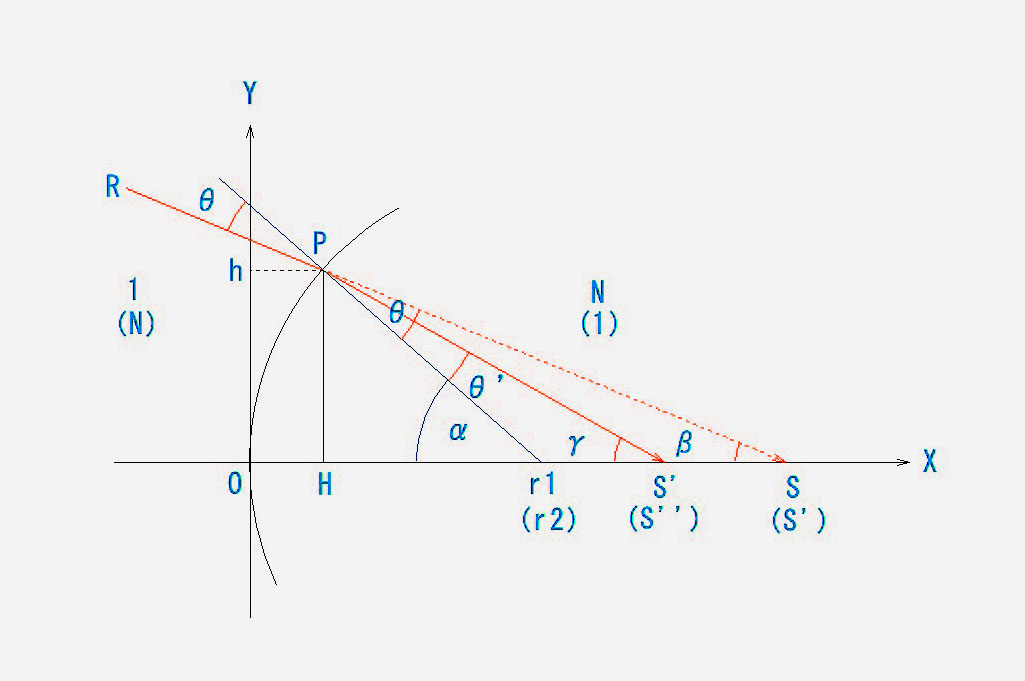
まず、屈折の法則である、Nsinθ=N’sinθ’が、近軸領域では、Nθ=N’θ’となることを前回までにご説明しました。ここでは、よりシンプルにするために、N=1, N’ =N とします。
X座標の負領域(屈折面まで)を空気中(屈折率=1)とし、正領域の屈折率を1とします。
7.従って、θ=Nθ’ となります。
近軸を前提としているので、屈折面(半径r)はY軸と密着しているはずですが、作図の都合上、見やすいように描いています。
8. 上図から、θ=αーβ、θ’=αーγ となります。
9. 近軸前提なので、α=h/r1、β=h/S、γ=h/S’ となります。
(Sが物点(虚物点)で、S’がその像点とします。)
10. これらを(8)の式に代入すると、θ=h(1/r1ー1/S)、θ’=h(1/r1ー1/S’) となります。
11. これらを(7)の式に代入すると、h(1/r1ー1/S)=Nh(1/r1ー1/S’) → (1/r1ー1/S)=N(1/r1ー1/S’)
となります。
12. さらに整理して、N/S’=1/S+(N-1)/r1 となります。
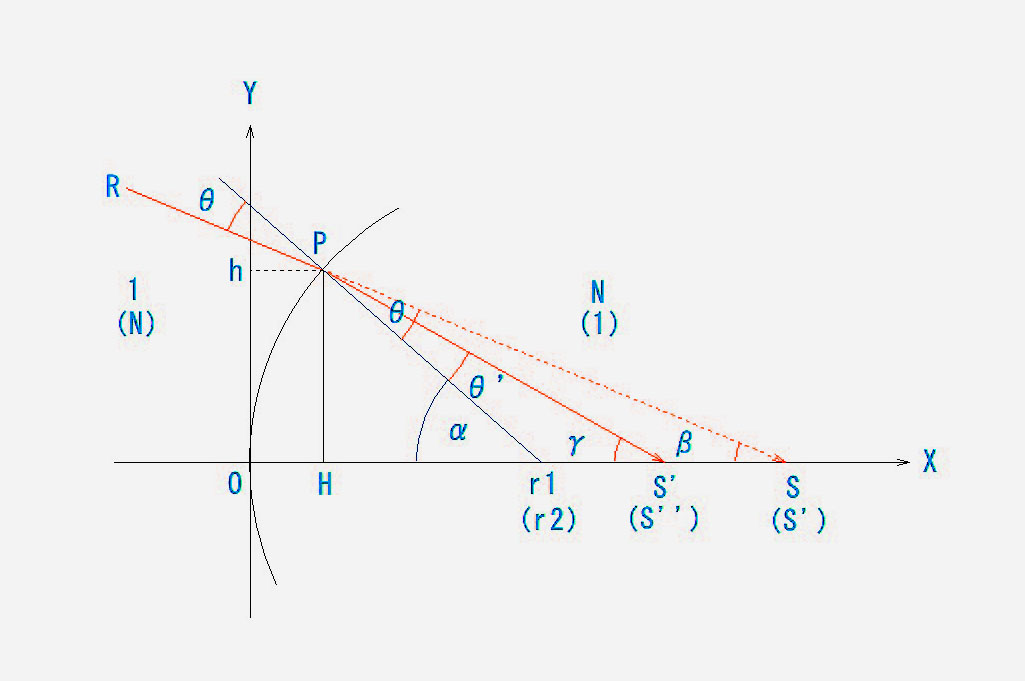
13. 次に、屈折率1とNの領域を反転させたモデルで計算してみます。
つまり、薄レンズの第2面による屈折の考察です。S’が第2面での屈折の新たな物点になり、その像点S”を求める式を立ててみます。
(12)の式のエレメントを入れ替えて、1/S”=N/S’+(1-N)/r2 と表せます。
14. これと(12)の式から S’ を消去すると、1/S”=1/S + (N-1)(1/r1ー1/r2)、もしくは、
1/S”ー1/S =(N-1)(1/r1ー1/r2) と表せます。(近軸結像公式)
15. ここで、物点距離S→∞ とした時のS”が薄レンズの焦点距離 f なので、
1/f =(N-1)(1/r1ー1/r2) となり、これが薄レンズのパワー(度数)になります。
● r が入射光線に対して凹面の場合は、r < 0 となります。X-Y 座標に忠実に正負を設定する限り、どんなケースでも式は破綻しません。
ここまでご理解いただいてから、講座1に戻っていただきますと、より理解が深まるかと思います。
理解できないところがありましたら、その番号をお知らせいただけば、さらにご説明します。
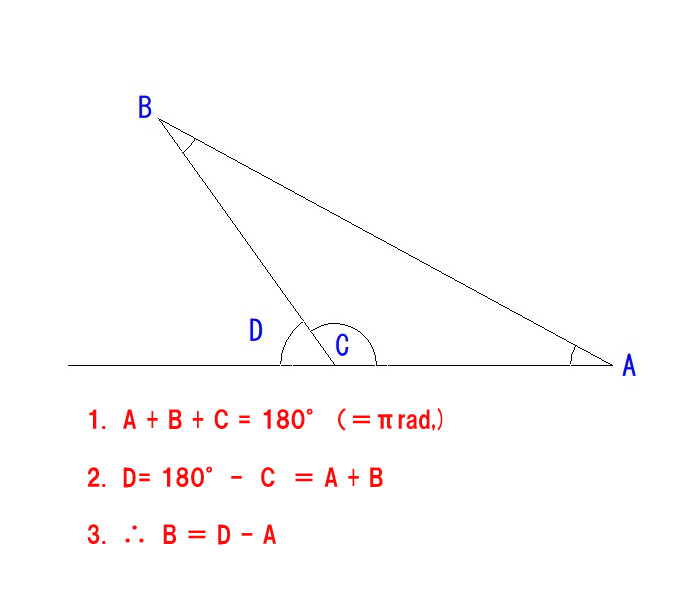
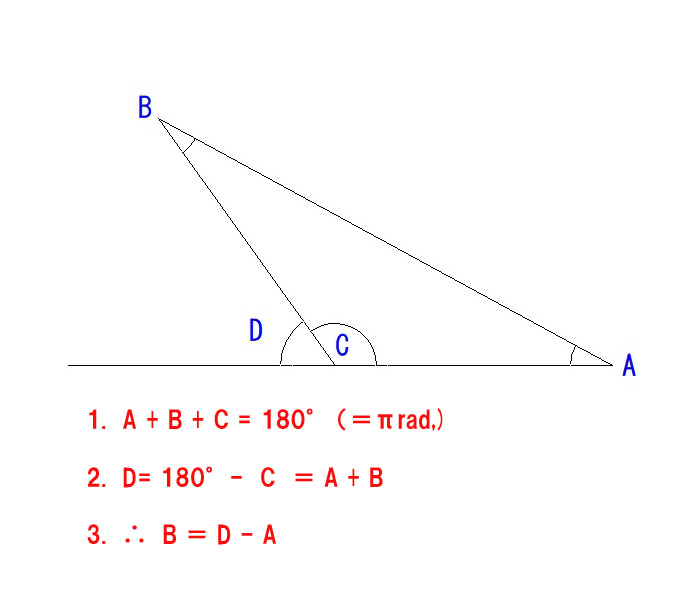
4. 三角形の基本定理です。∠A + ∠B + ∠C=180° (πrad.)
5. ∠Cの補角、∠D=∠A + ∠B
6. 上記より、∠B=∠Dー∠A
以上、三角形の基本中の基本の定理ですが、よく使うため、改めてご説明しました。
ここまで、準備運動1,2の項目について、連番を1~6まで振りましたので、分からない方は、何番から分からないのかをお知らせいただければ、さらにご説明します。
1. 後先になりましたが、準備運動からやりましょう。
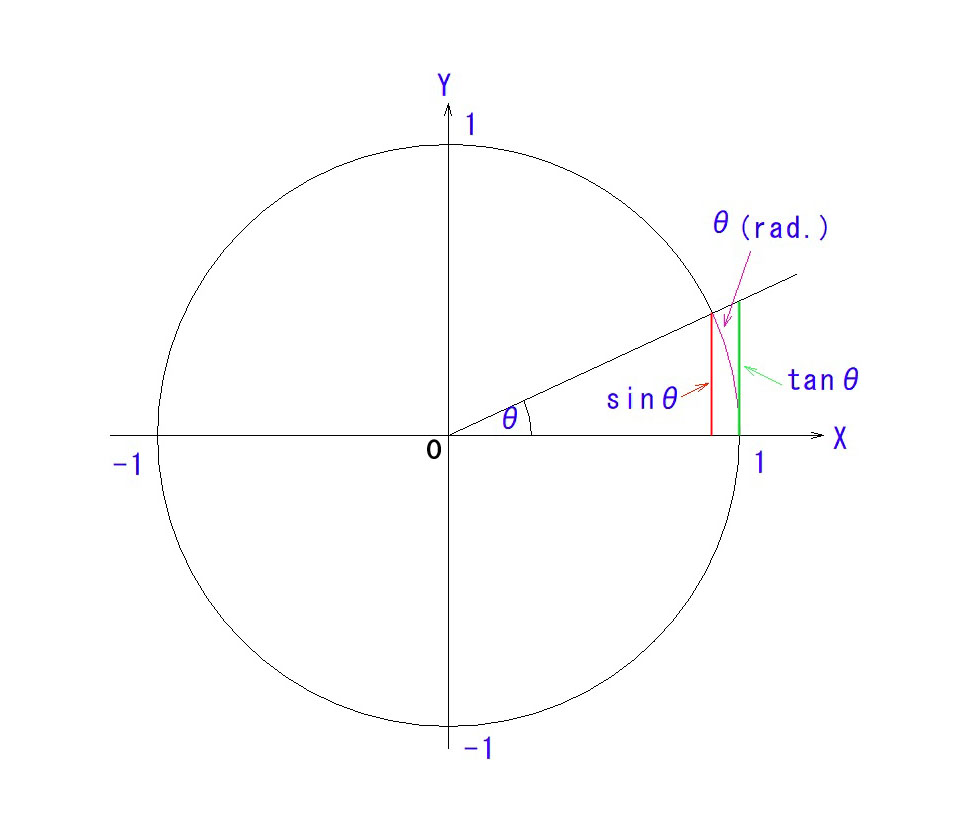
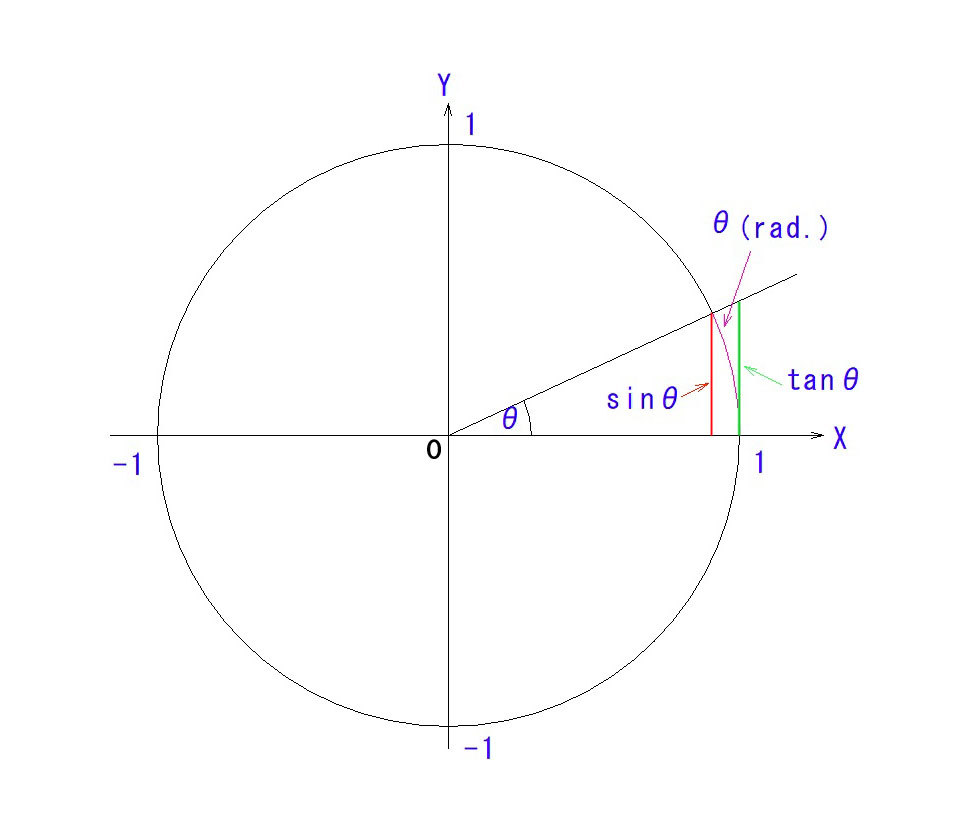
幾何光学で扱う角度は、断りが無い限り、一周360°の角度(度数法)でなく、ラジアンという単位(弧度法)の角度です。弧の長さが半径の何倍か?ということです。図の単位円(半径=1の円)の、θの弧の長さのことです。
2. そして、sinθは、図の赤い直線の長さ、tanθは緑の直線の長さです。
3. θ → 0 のとき、sinθ も tanθ も θ に収束するので、全てθとして扱っても差し支えないのです。
試しに、度数法の3°について、三者の数値がどうなるか、計算してみましょう。
sin3°=0.52335……..
3° =0.52359… rad.
tan3°=0.52407…..
3°付近でも、すでに3者の数値はかなり収束しています。角度がゼロに近付く(ほぼ光軸上)ほど、3者が収束することにご納得いただけたと思います。また、上図からも、グリーン、マゼンタ、レッドの3つの直線/弧 の長さが、θ→0のときに収束して行くことは、直感的にもご理解いただけるはずです。
今回は、理解できる、できない、の問題ではなく、すでに立証されている屈折の法則をご説明するものなので、素直に受け入れて、覚えていただく必要があります。
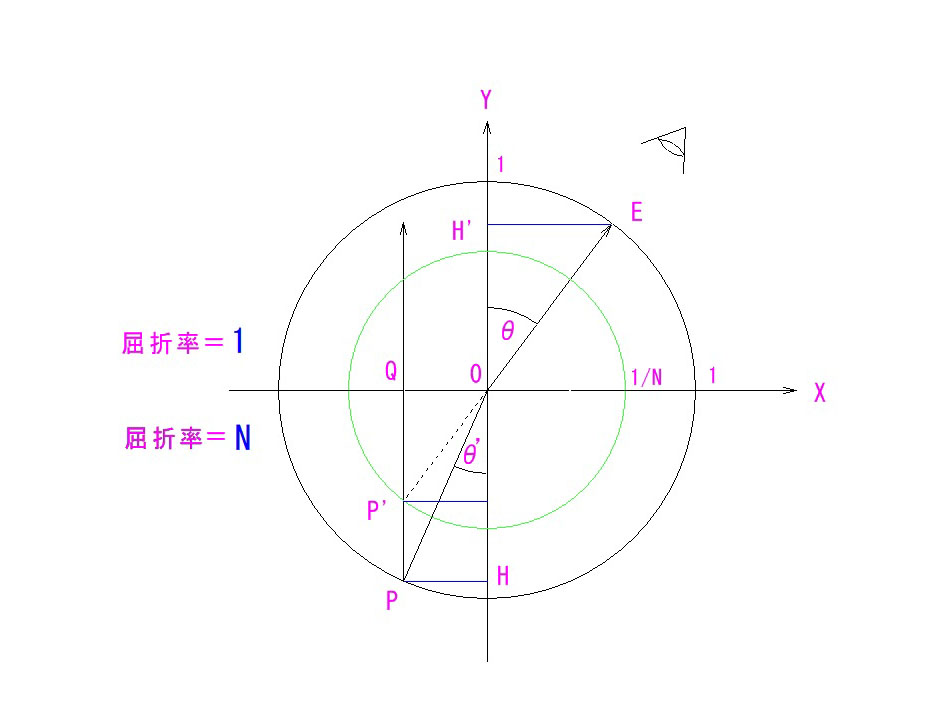
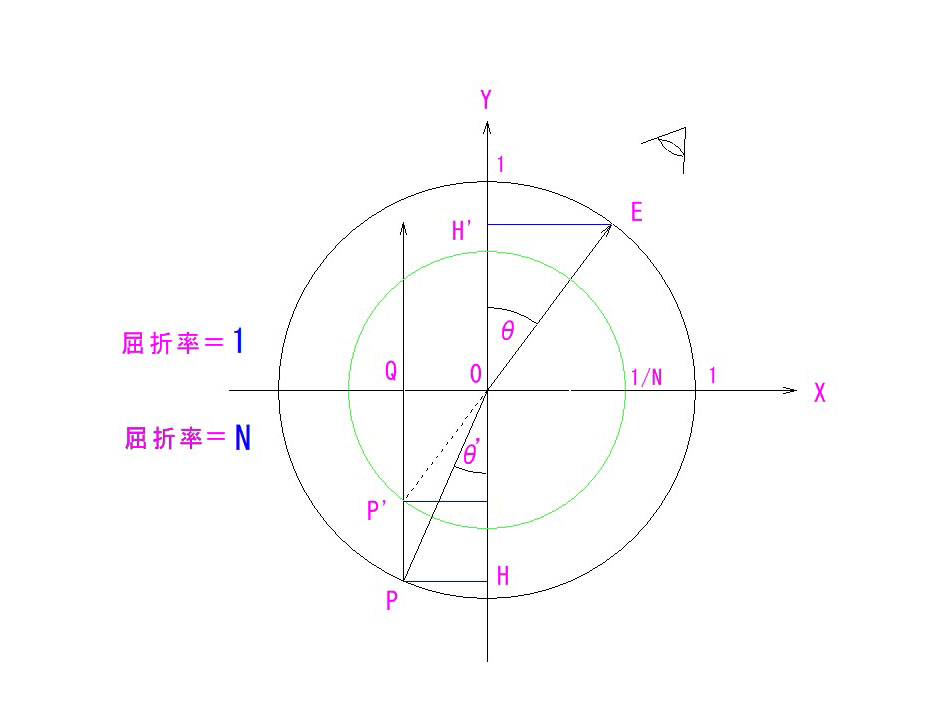
屈折率がNとN’の界面に於いて、入射光線の入射角=θ、屈折角=θ’とすると、
Nsinθ=N’sinθ’ となることはすでにご存じと思いますが、それを可視化すると、上図のようになります。よりシンプルにするために、N=1(空気中)としています。
EH’/PH=N が屈折の法則、そのものになります。(OP/OP’=N と考えても同じ)
Y座標の負領域が屈折率Nのガラスあるいは液体と考えてください。
Eから見ると、点PがP’に浮き上がって見えるわけです。
その浮き上がりは、OP/OP’=Nなので、厳密には QP/QP’ ≠ N なのですが、θ → 0 のときに、QP’ → OP’、QP → OP に収束するので、近軸領域では、QP/QP’ = N として差し支えないのです。
ここでお分かりのように、反射の場合は、反射面が平面であれば常に完璧な結像を結ぶのに対し、屈折の場合は、たとえ界面が平面でパワーがゼロであっても、諸収差を免れないということです。
従って、θ → 0 で、sinθ=tanθ=θ (単位はrad.)の近似が成り立つ近軸領域に限定した、シンプルな公式 (Nθ=N’θ’) を立てるわけです。この辺の近似の考え方が、多分、初学者を混乱、落胆させる要因だろうと思います。
近軸公式だから、現実では役に立たないのではなく、無収差の理想光学系であれば、近軸の結像状態が全体を代表するし、そうでない場合は、光軸から離れた光線も同じ結像をするように設計努力するための目標、指針、骨格を提供するわけだから、近軸公式の存在意義は十分に大きいものがあるのです。
4回までの講座について、理解いただいた方がほぼ皆無なのは何故だろう?
どうやら、基礎の基礎、物(ぶつ)と像(ぞう)の意味が分かっておられないのでは?と思う。
もしかしたら、これが突破口になるような気がする。
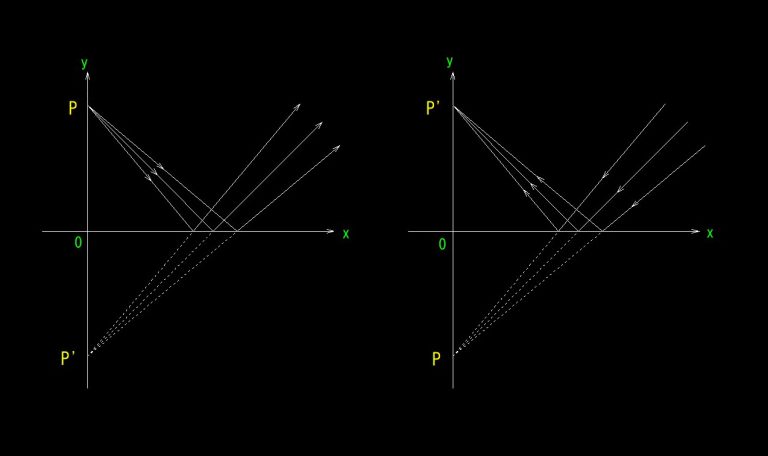
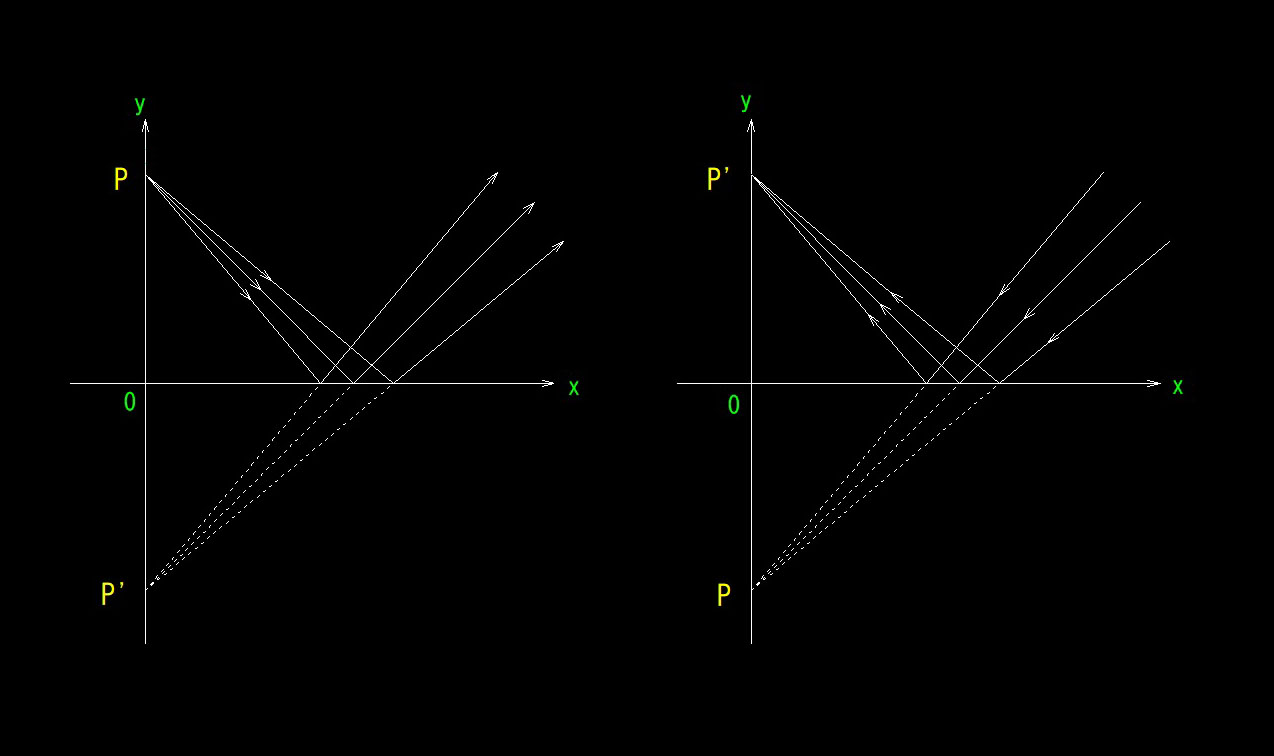
一番シンプルな光学系である、平面鏡をモデルにする。
XZ平面が鏡面とする。左の図を見てください。
実物点Pから発した光線は全てXZ平面に対して対称な点であるP’から出射したようにXZ平面で反射する。作図していない、どの光線も同様に振舞う。一般に、光路図では、せいぜい1本か2本の光線しか描かないので、誤解している方が多いと思う。図は便宜上Y軸の正領域の一点に物点を置いたが、XZ平面より上の物空間にあるどの点も、Y座標の符合が反転するだけで、X,Z座標の値は変化しない。
次に、右の図を見ていただきたい。
物と像は逆にもなる、つまり共役だということを示しています。
自然界では滅多にないが、Pに向かって収斂する光束は全てP’に実像を結ぶ。
Pを虚物点と言う。虚像点P’も、虚物点Pも手で触ることは出来ないが、それぞれが立派な点である。


雨がぱらつく中、慌てて撮ったら、ピンぼけでした。^^;