過去2回に渡って、像の向きの反転の様子を視覚的にご説明しましたが、今回は数学的に検証する方法をお示しします。
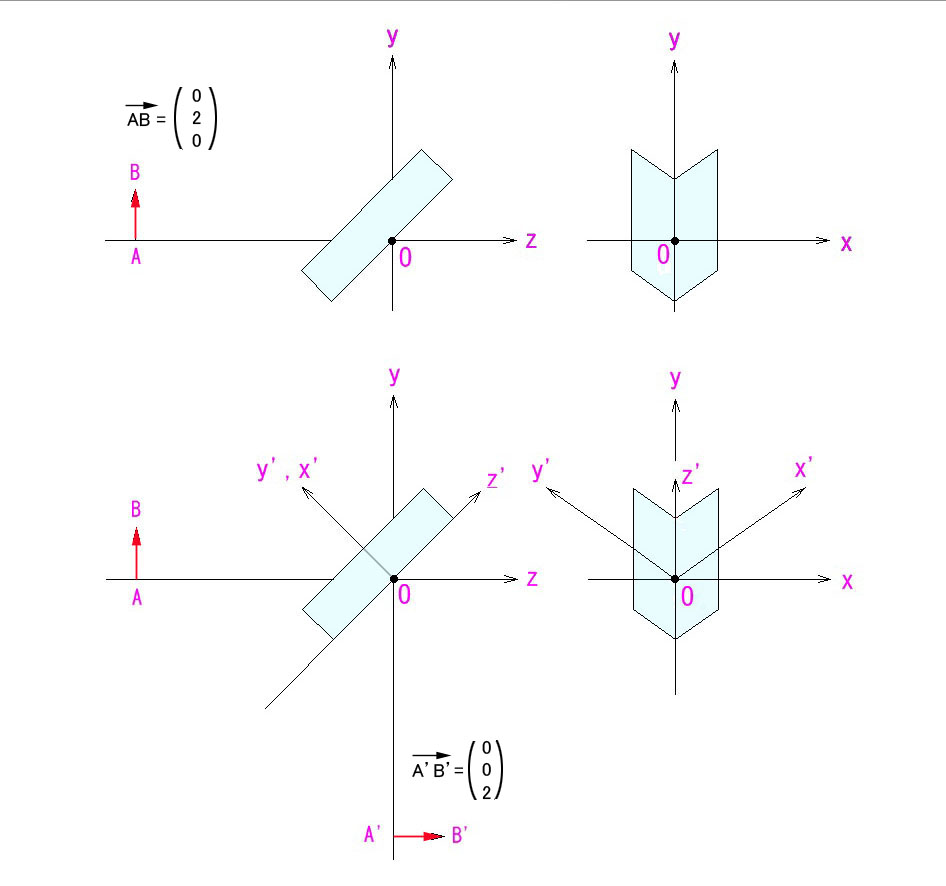
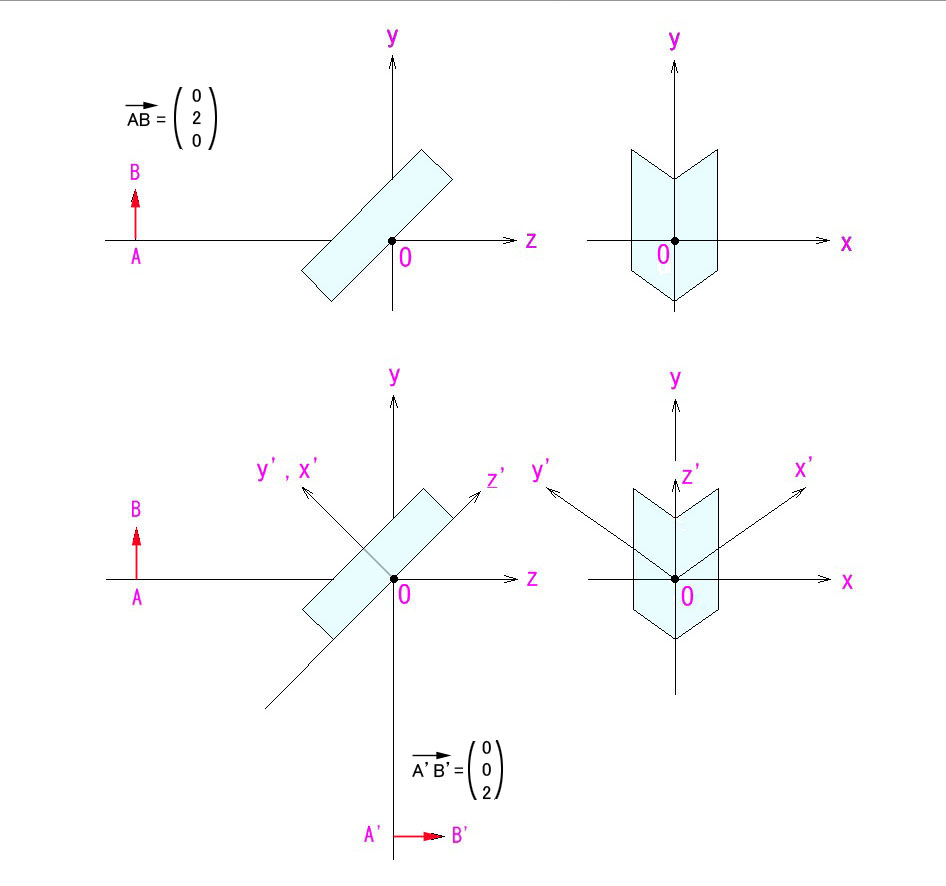
まず、目標 AB と2枚鏡(説明略)を上の図のように配置します。座標軸 x-y-z をご確認ください。
AB→ の2枚鏡による像が下の図の A’B’→ のようになっていれば、物の向きが完全反転(上下左右反転)していることになります。90度対空なので、観察者はy軸の正の方向から負の方向を覗くことになります。偶数回反射なので、裏像にはならないため、天地方向の反転を示せば、上下左右の反転を証明したことになります。
2回反射後の像が本当に A’B’→ のようになっているかどうかを、検証してみましょう。
上の図の座標軸のままですと、計算が複雑になるので、座標軸を都合の良い位置に回転させます。最終的に、下の図の x’-y’-z’ のように座標軸を回転させると、(新座標軸での)AB→ の成分 (a, b, c) が、2回反射後に (-a, -b, c) のように、x座標とy座標だけが符合を反転するだけになります。
具体的には、まず x 軸の回りに-45度(時計回り)座標軸(全体)を回転させ、次にz軸の回りに+45度(反時計回り)座標軸を回転させると、下の図の x’-y’-z’ となります。この作業は、x’z’平面が第1ミラー、y’z’平面が第2ミラーと一致するためのものです。
反転作業が終わったら、座標軸を元にもどすと、元の座標系での A’B’→ が求まるわけです。
座標軸は動かしても、物は元の位置のままであることをご認識ください。お宅の南向きの窓から見た鉄塔が左斜め45度にあったのが、西向きの窓から見たら右斜め45度に見えた、というのと同じことです。物差しの当て方を変えるだけで、測定が極めて楽になるという話です。
次回以降に、実際の行列計算を辿ってみることにします。
矢継ぎ早になりますが、実際に計算を辿ってみましょう。
まず、座標軸の回転について、高校時代にやられたのを復習しましょう。
x-y 座標で原点の回りに、x 軸を y 軸の方向にθ 回転させる変換行列は、
cos θ sin θ
-sinθ cos θ
ですが、x-y-z 座標で表しますと、z 座標は元のままなので、
cos θ sin θ 0
-sinθ cos θ 0
0 0 1
となります。x 軸、y 軸の回りに回転させる時も、同様のやり方になります。
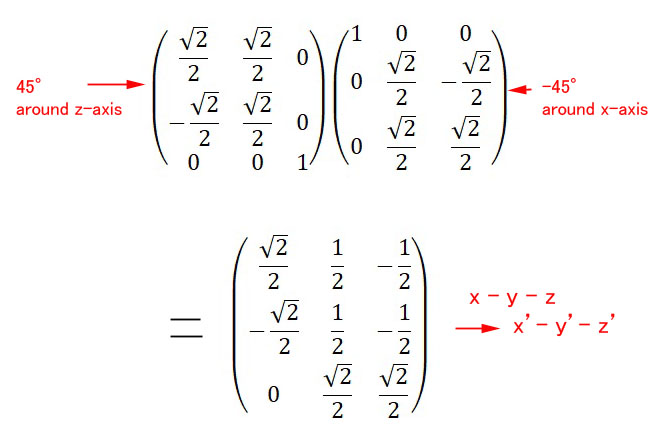
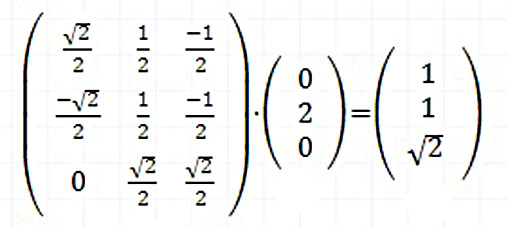
これが、上の図の座標軸 x-y-z を、x’- y’- z’ に変換する行列になります。
新しい座標軸 x’- y’- z’ では、AB→の元の方向ベクトル (0,2,0) が (1,1,√2) になります。
これが、図の2回反射後には、新しい座標軸で (-1,-1√2) になるわけです。
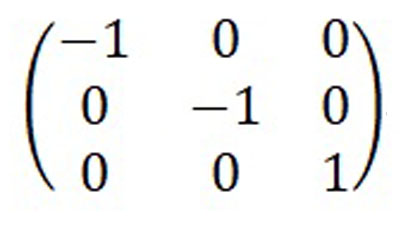
これが、x’-y’-z’ 座標での2回反射による変換行列です。
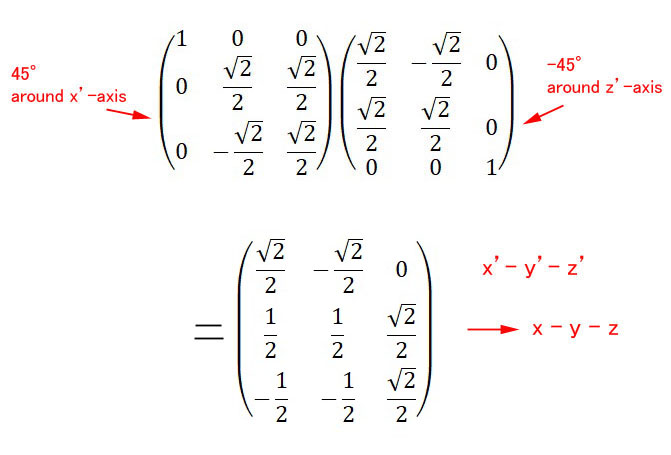
(-1,-1√2)が元の座標軸でどうなっているか、座標軸を元に戻して見ましょう。
座標軸を元に戻す行列は、前回の操作の逆をたどることになります。
回転の順序が極めて重要で、順番を間違うと全く違う結果になってしまいます。
この行列を使って、さきほど求めたAB→の2回反射後のA’B’→のx’- y’- z’ 座標での(-1,-1√2) が元の座標ではどうなるか、見てみましょう。
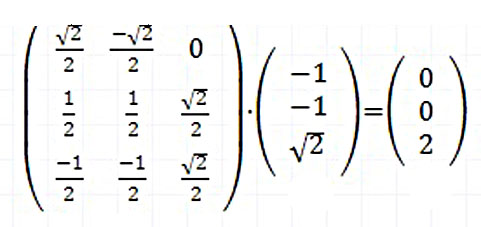
どうでしょう? ちゃんと予想した通りになりましたね。
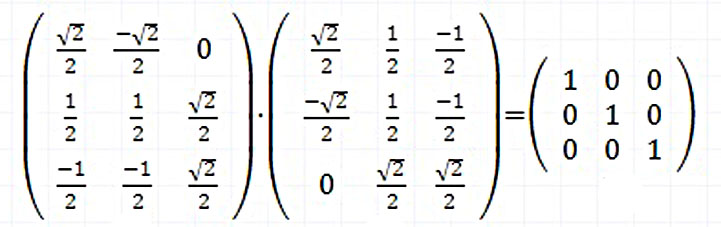
因みに、x-y-z を、x’- y’- z’ に変換した行列と、それを元に戻した行列は互いに逆行列になっています。
試しに、両者を掛けてみてください。単位行列になることが分かります。