正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
カテゴリー: BINO Progress Report | 製作状況速報
日英併記としましたのは、海外向けの他、国内の方にも、より多い情報量を効率良くお届けしたい(共有したい)からです。
両者は必ずしも同一内容ではございません。英語の方がよりストレートに表現できる場合もありますし、両言語で内容を補完し合っていることもございます。 FACEBOOKでは、よりリアルタイムな情報とユーザー様からのフィードバックが見れますので、そちらもぜひご参照ください。
Please check my FACEBOOK, too.
You can see the older posts at the Internet Archives,too.
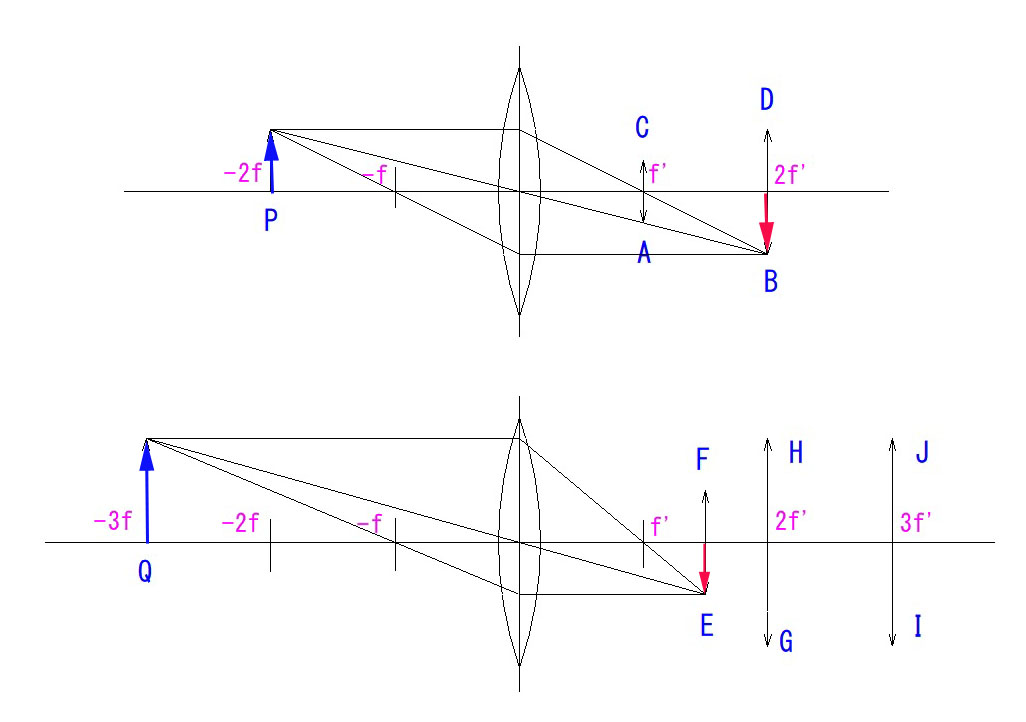
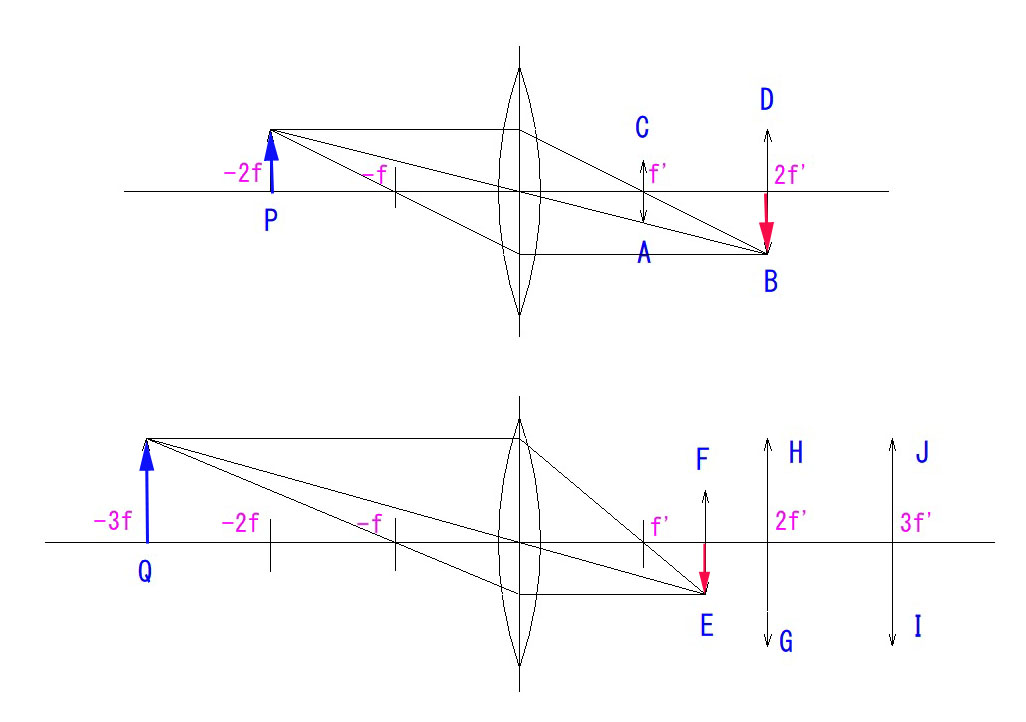
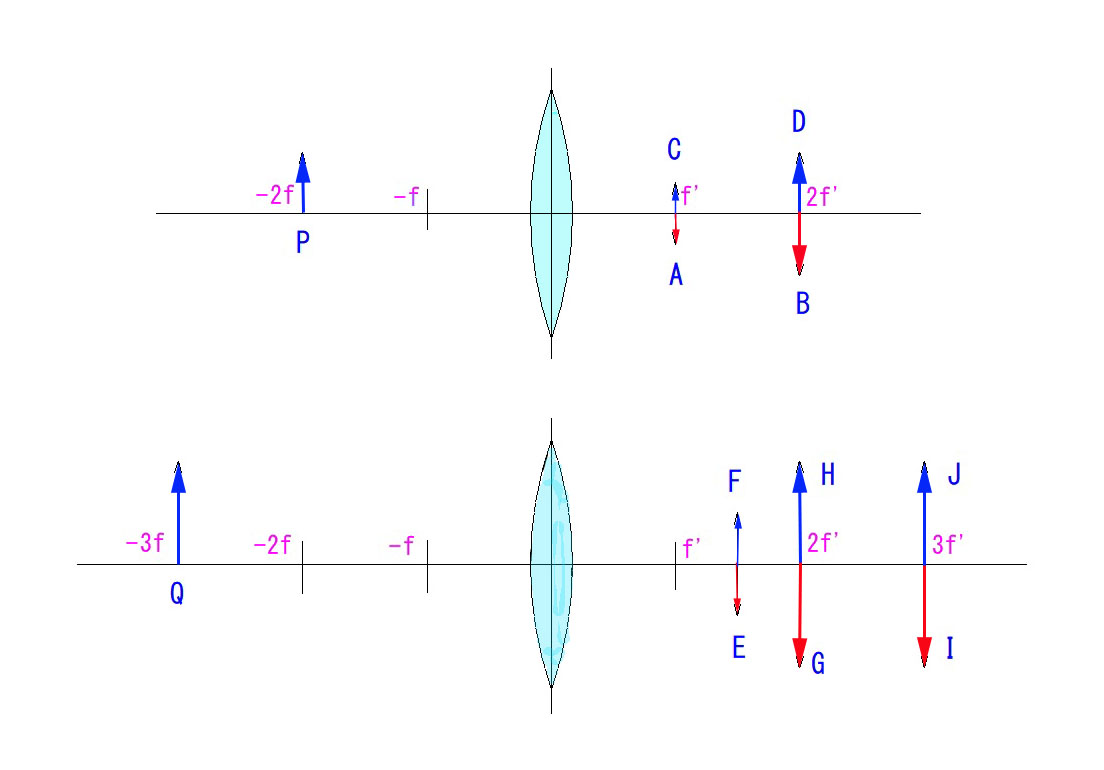
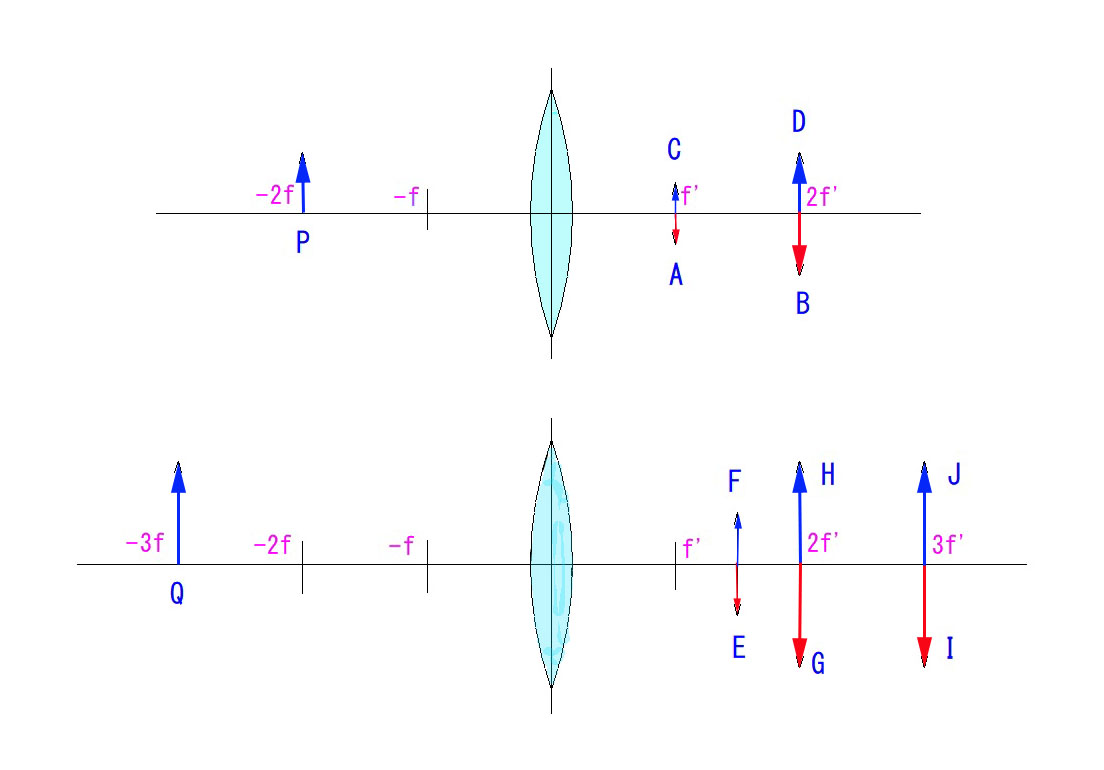
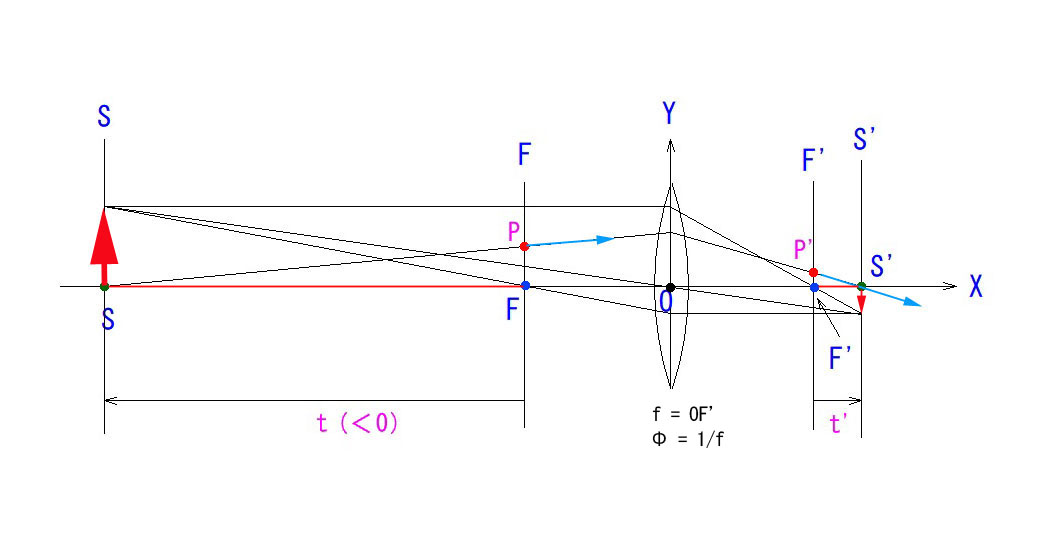
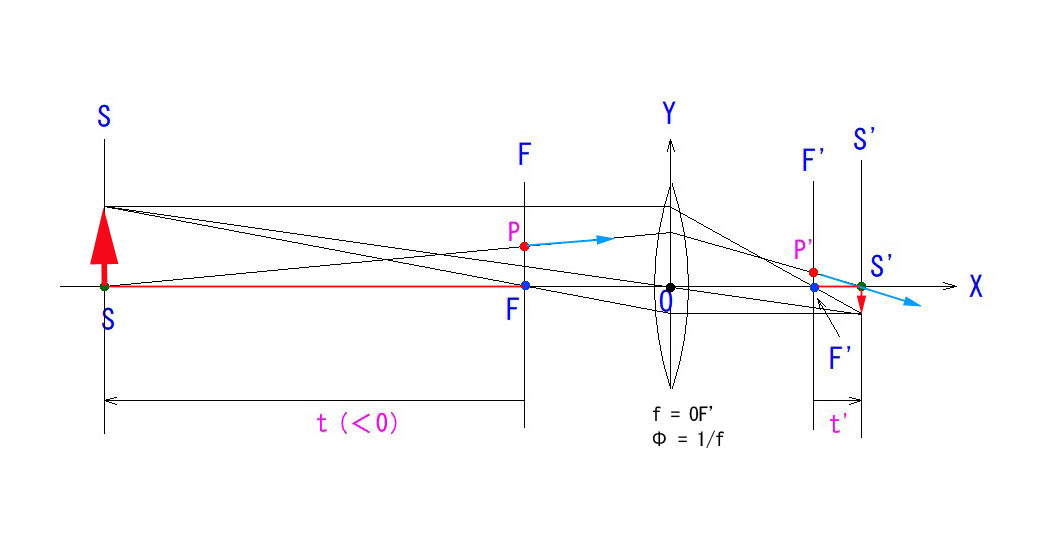
まず、凸レンズによる実物体の実像は、常に倒立ですから、前問の正立像(ブルーの矢印)は全て不正解ということになります。 また、もし光軸に目盛りが打ってなくて、物点位置も規定されてなければ、A も I も正解になります。Gも紛らわしいですが、Gの像位置がQよりもレンズに近いので、Qよりも像が小さくないとおかしいですね。 しかし、レンズの焦点位置を明記していますので、正解は B と E に限られるわけです。 ここで、(近軸の)光路図についての考え方ですが、以前にも問題にしましたように、レンズ前に障害物があっても、無い物として描いて、全く差支えありません。あるいは、物の高さがレンズより高くても、レンズ面を延長して作図イメージすれば良いのです。近軸理論ではあっても、作図まで敢えて細く描く必要はないのです。
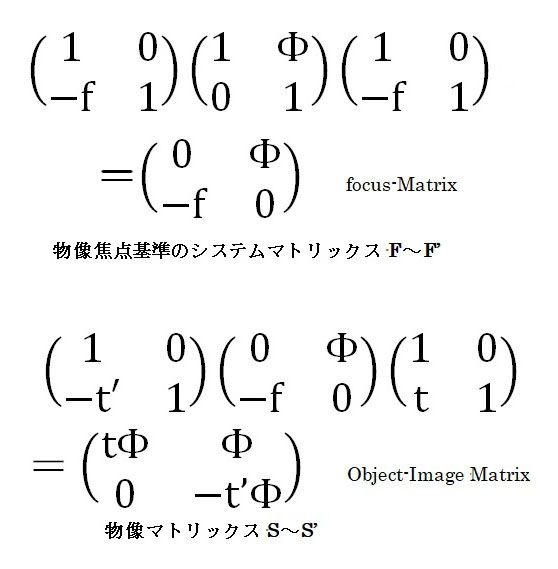
次に数式で考えてみます。 物側、像側の焦点を基準にすると、上の図では、 物点距離=-f、像点距離= f ですから、その積=-f`^2となって、ニュートンの公式を満たします。
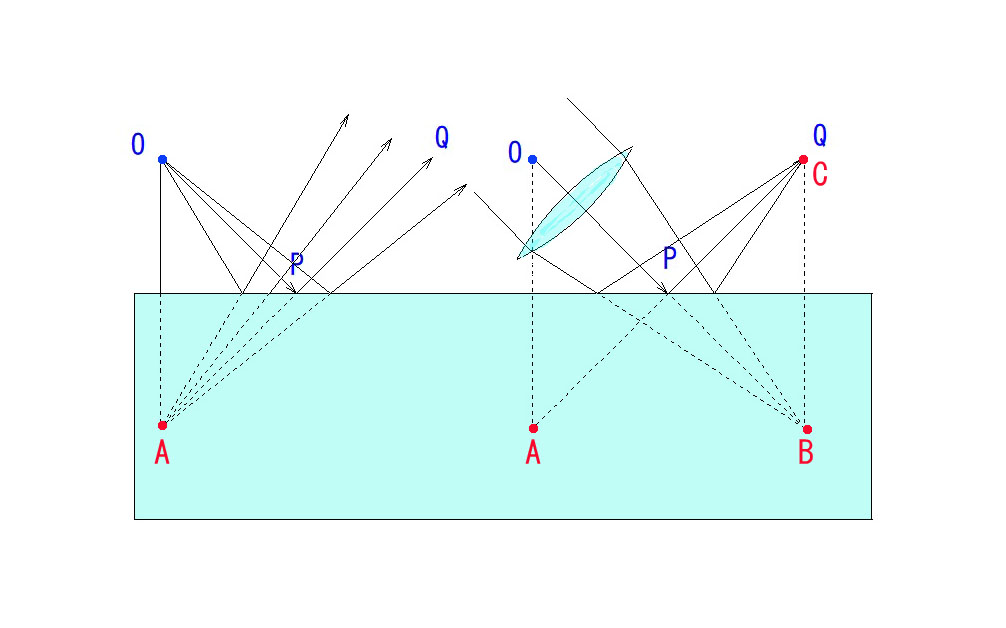
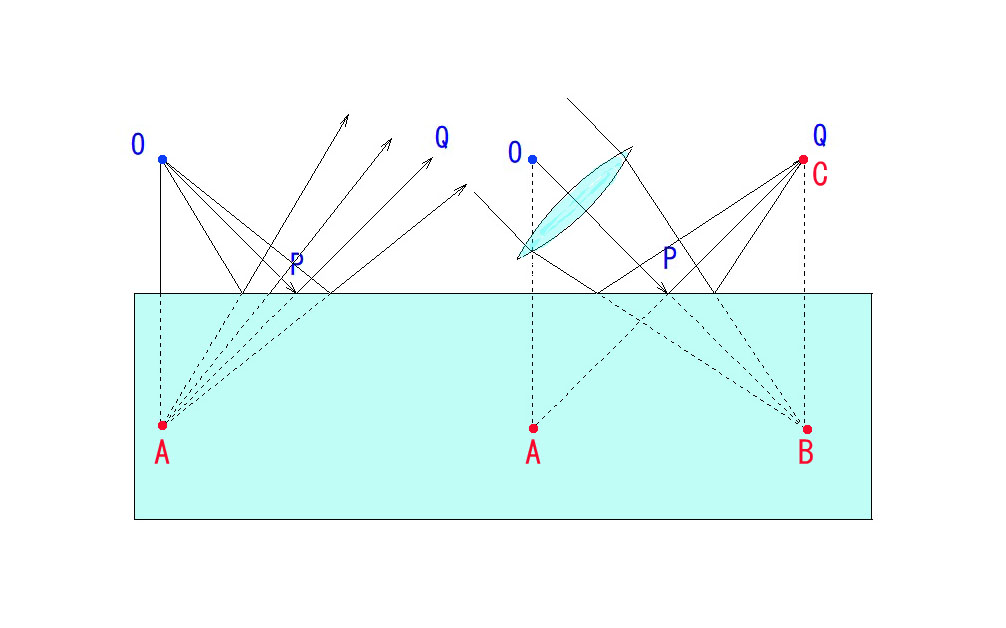
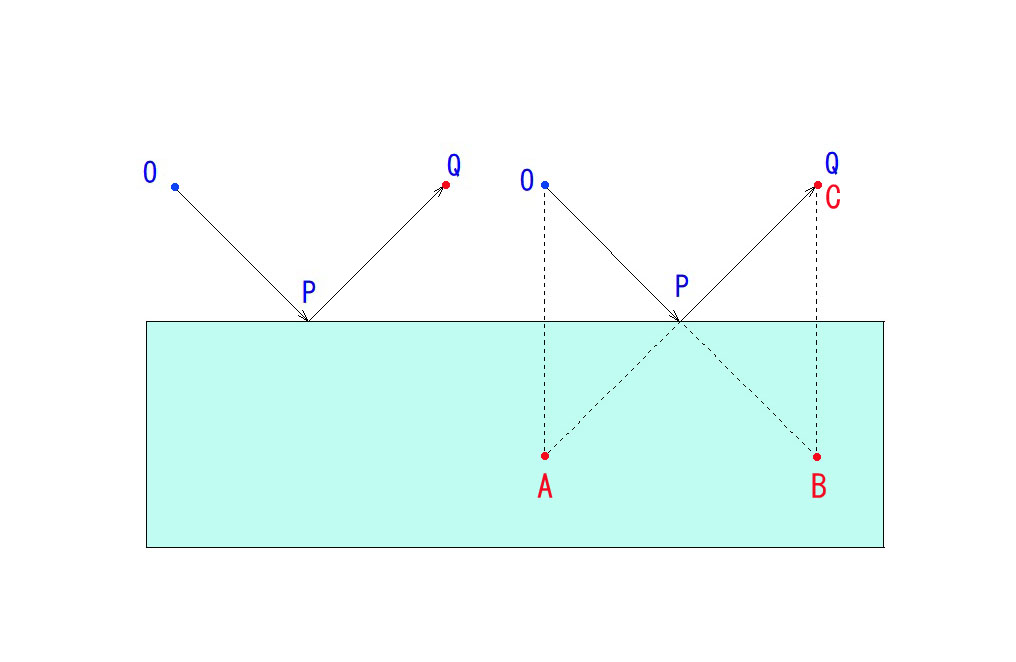
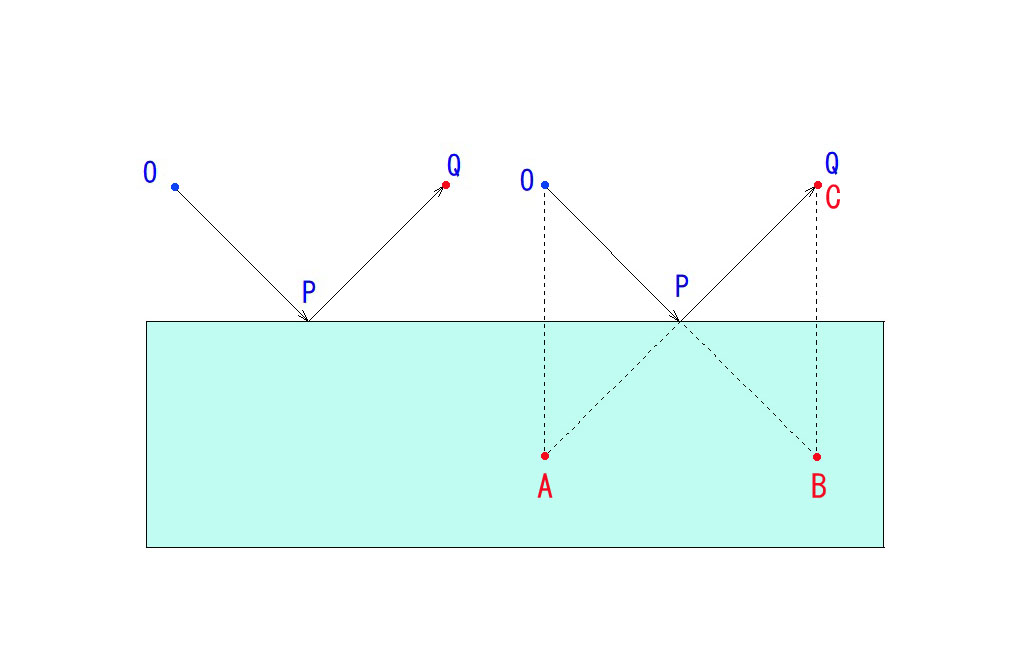
A(正解)と答えた方が多かったと思いますが、意外に天文マニアで C と答えた方も少なくなかったはずです。なぜなら、ニュートン反射の斜鏡のイメージがあるからです。多分、密かに C と答えてしまった方は、図の右のようなイメージがあったのだと思います。 自然界ではほぼないのですが、右のように凸レンズ(や凹面鏡)でBに収斂される光束がミラー面に投入されれば、Cに実像を結びます。Bは虚物点で、Cはその実像になります。 平面鏡単体では、光束を収斂させるパワーがないので、像は常に虚像になり、その存在位置は常にミラー面より向こう側になります。これは、日々、姿見の鏡で体験されているはずです。像は、鏡面に対して、常に反対の対称位置に出来ます。観察者の眼の位置は無関係です。像点が決まれば、前の鏡は無い物として考えれば良いわけです。 また、”物”と”像”の相互、互換性も極めて重要なポイントです。 O から発する無数の光線は全て A から発したように反射する。そして、A をめがけて収斂する全ての光線は、O に実像を作ります。
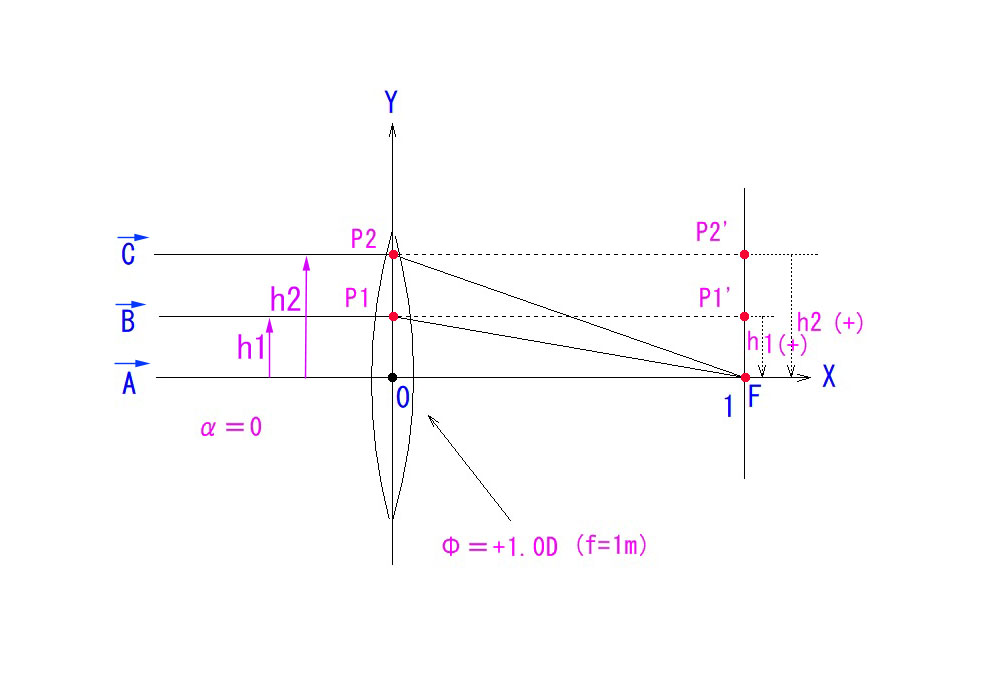
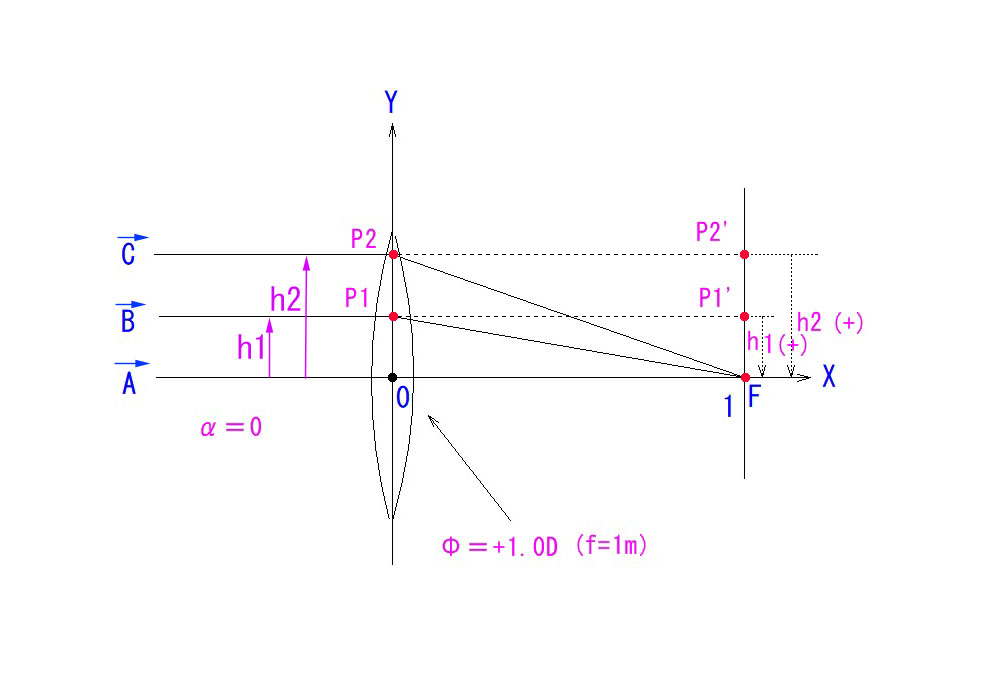
上図のように、平行光線 A, B, C が全て F に結像するのが、理想結像です。 今回も、レンズは厚みが無視できる、度数Φ=+1.0(焦点距離=1.0m)の凸レンズとします。 Φ=1.0Dとしたのは、光線傾角 tangent の分母が常に1になり、傾角要素のαが、α=tanα=h となって、長さの要素として可視化できるためです。(αは、下向きが+で、上向きがーです。)
入射光線の傾角 α について、パワーΦの屈折面を高さ h で通過後に α’ となるとすると、 α’=α+hΦ (Φはレンズの度数、1/f ) となることについて、図に則してご説明します。 P2で光軸に平行に入射する光線 C は、傾角α=0,h=h2, Φ=1, を、それぞれ上式に代入すると、 α’=0+h2 = h2 となり、焦点 F でX軸と交わります。 光線 B も同様に計算できます。(α’=h1)
入射光線 B についてご説明しますと、P1で屈折しない場合は、P1’に到達しますが、屈折により、P1’→Fに移動するわけです。 お気付きと思いますが、αもα’も、通常の角度ではなく、tanα で定義されているところが重要です。 この図でも、α’=α+hΦ となっていることがお分かりになると思います。
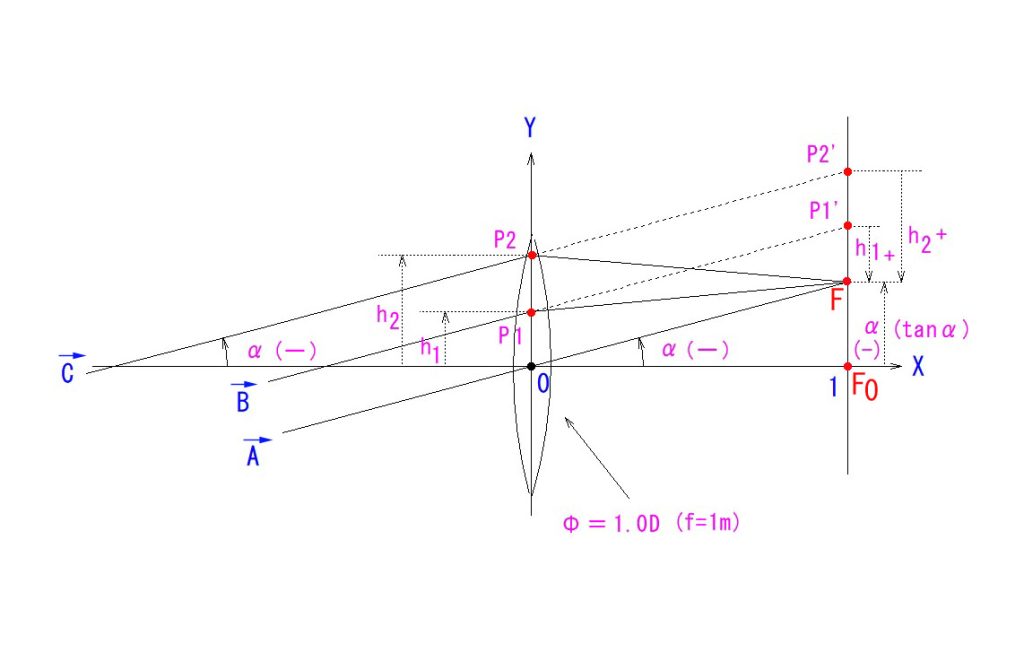
理想の薄レンズに入射する光線は、「レンズ上の入射点の高さ h とレンズの度数 Φ に比例した角度で曲がり、それは入射光線の傾角に依存しない。」—ということです。(ただし、角度は下向き “tangent”で定義された値。) * h の初期値には、全く制限がなく、どんな数字を入れてもかまいません。(計算に好都合な初期値で良い);
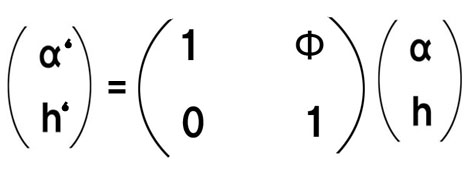
繰り返しになりますが、 α’=α+hΦ h’= h これを行列表記すると、こうなります。↓
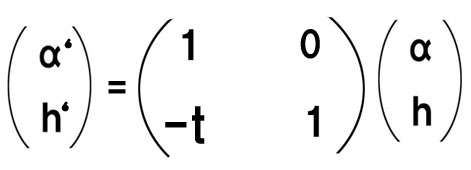
また、2つの屈折面に挟まれた空間は屈折せずに直進するため、αは変化せず、h のみが変化します。 通過間隔(光の進行方向=+)= t とすると、 α’=α h’= h – αt これを行列で表記すると、こうなります。