
I was in the Hospital from 12/3 to 12/12 and have come home just now.
今回は短期の入院予定でしたので、ここで入院の告知をせず、多方面にご心配をおけかして申し訳ございませんでした。本日より正常に営業を開始いたしましたので、よろしくお願いいたします。
(治療は退院後も続きますので、時々閉店しておりますが、よろしくお願いいたします。)

Innovation of Astronomical Telescope
正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
I think my web-diary is a bottle-mail to be thrown into the cyber ocean.
I believe there must be someone in the world who shares my feelings with. I do not intend to debate on anything with anyone.
I welcome the favorable e-mails only.
e-mail
FACEBOOK
You can see the older posts at the Internet Archives,too
Webの大海に流す瓶入りの手紙、そんな感じでWEB日記を書いています。共感いただけたらメールをください。
Debate をする気はないので、反論のメールは要りません。^^;
よろしければ、FACEBOOKもご覧ください。
古い投稿は、ネット・アーカイブでもみられます。
I was in the Hospital from 12/3 to 12/12 and have come home just now.
今回は短期の入院予定でしたので、ここで入院の告知をせず、多方面にご心配をおけかして申し訳ございませんでした。本日より正常に営業を開始いたしましたので、よろしくお願いいたします。
(治療は退院後も続きますので、時々閉店しておりますが、よろしくお願いいたします。)


Comment by Matsumoto/ 管理者のコメント;
時たまいただく、単体EMSユーザーさまからのリポート、大いに励みになります。
純然たる個人事業で始めた私にとっては、元来、単体EMSの供給が能力の限界であって、BINO関連を始めたのは、無謀だったかも知れない?なんて考えることもあります。かなり背伸びをして今日に至りました。^^;
2種類のEMSの色の違いから、長年EMSを愛用してくださって来たことが分かります。


麒麟 Kirin is the legendary animal originated in ancient China, and
獅子 Shishi is also halfly legendary animal for the ancient Asia, but often regarded as a Lion reproduced by the remote propagation without directly watching it.
Kirin-Jishi is the combination of the two kinds of the legendary animal in ancient Japan.
This key-holder type of the head of KIRIN-JISHI was brought and given to me by my friend when I left the Hospital after one-month. What increases the value of it is that it was just my friend originally made, even it is the metal-alloy reproduced from his original carvings.
投稿が遅くなりましたが、退院直後に友人から頂いた、麒麟獅子頭のキーホルダーです。
小さいながらずっしりと重い金属の鋳造ですが、オリジナルの彫刻は、その友人が作られた物。
これは、なかなか使う気になれず、まだ箱のまま保管している。
退院直後は、実はほぼ死ぬ気だったのですが、その後、ほぼ奇跡的に状態が良くなり、今は、通常の生活が戻っています。迷信には縁遠い自分ではありますが、麒麟獅子や友人たちの念が守ってくれたことは、大いにあり得るなあ、と感じる、今日この頃です。
6/4日から1週間ほどの見積りで入院いたしましたが、退院が長引いてしまい、本日退院いたしました。
今日までご不便をおかけしましたことにつき、深くお詫び申し上げます。
(入院中は、逐次近況をFACEBOOKに投稿しておりましたが、PCにアクセス出来ず、サイトの更新が出来ませんでした。)
I am sorry to say that my blood disease was discovered and have to focus on the treatment for the time being.
Two pairs of the EMS-UXL will be finished before I go to the hospital on 6/6.
But I must apologize to other guys who are waiting for the orders , asking for another week or two to wait more.
血液の病気に罹患してしまい、来月の初旬より、しばらく入院致します。
EMS-UXL ×2 は、入院予定日(6/6頃?まで延ばしてもらう予定)までに仕上げるつもりですが、その他の方につきましては、大変恐縮でございますが、さらに1~2週間程度お待たせしますこと、なにとぞお許しくださいますよう、お願い申し上げます。
タイトルを読んで、小躍りして喜んでいる方も少なくないのでは? と思う。
「45度対空のEMSを作ってください!」という要望が、ある程度光学をかじった方(古参マニアや業者さん)から入ることがあるからです。
理論的には、確かに可能なんですが、転向角度の小さいEMSは、ミラー面への入射角がさらに大きくなることを意味し、現実的ではないのです。
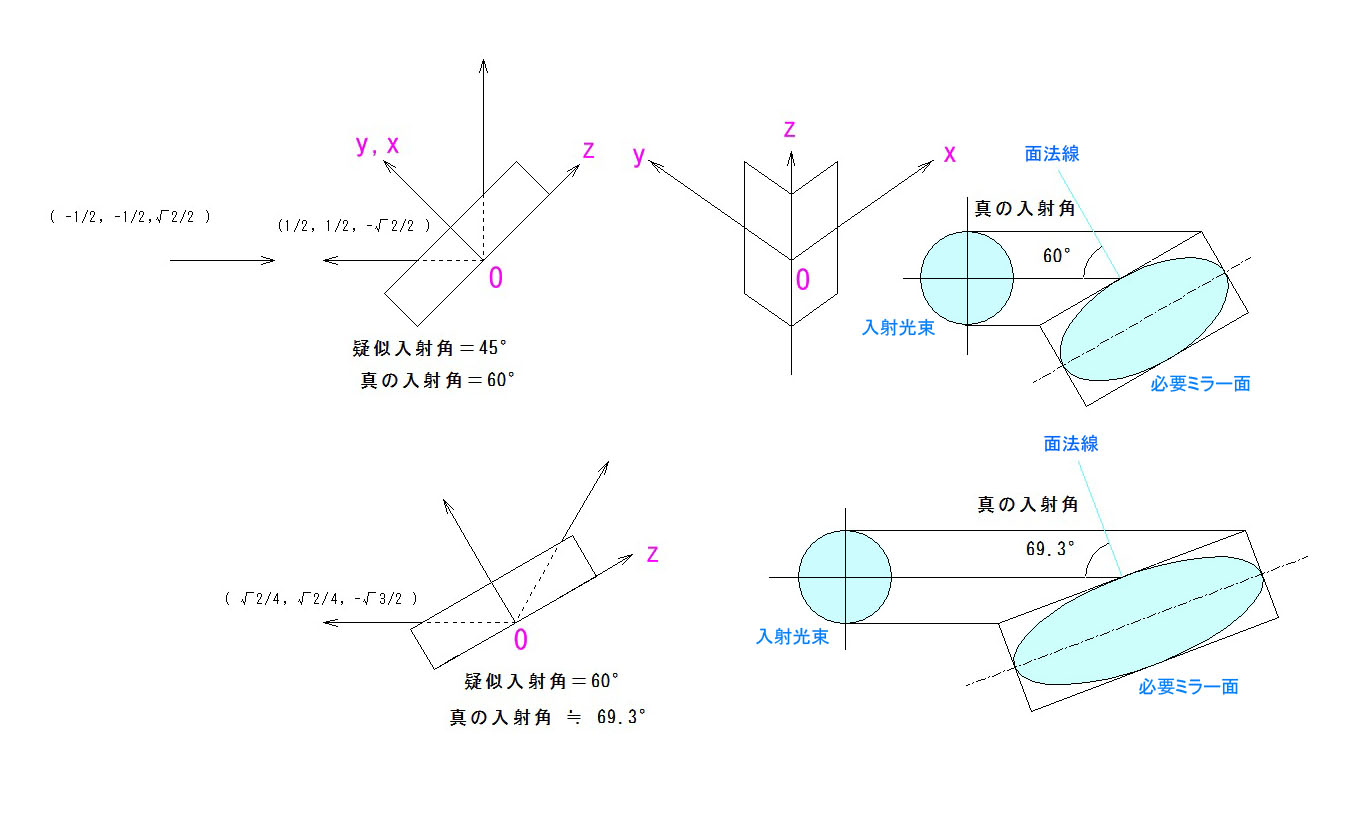
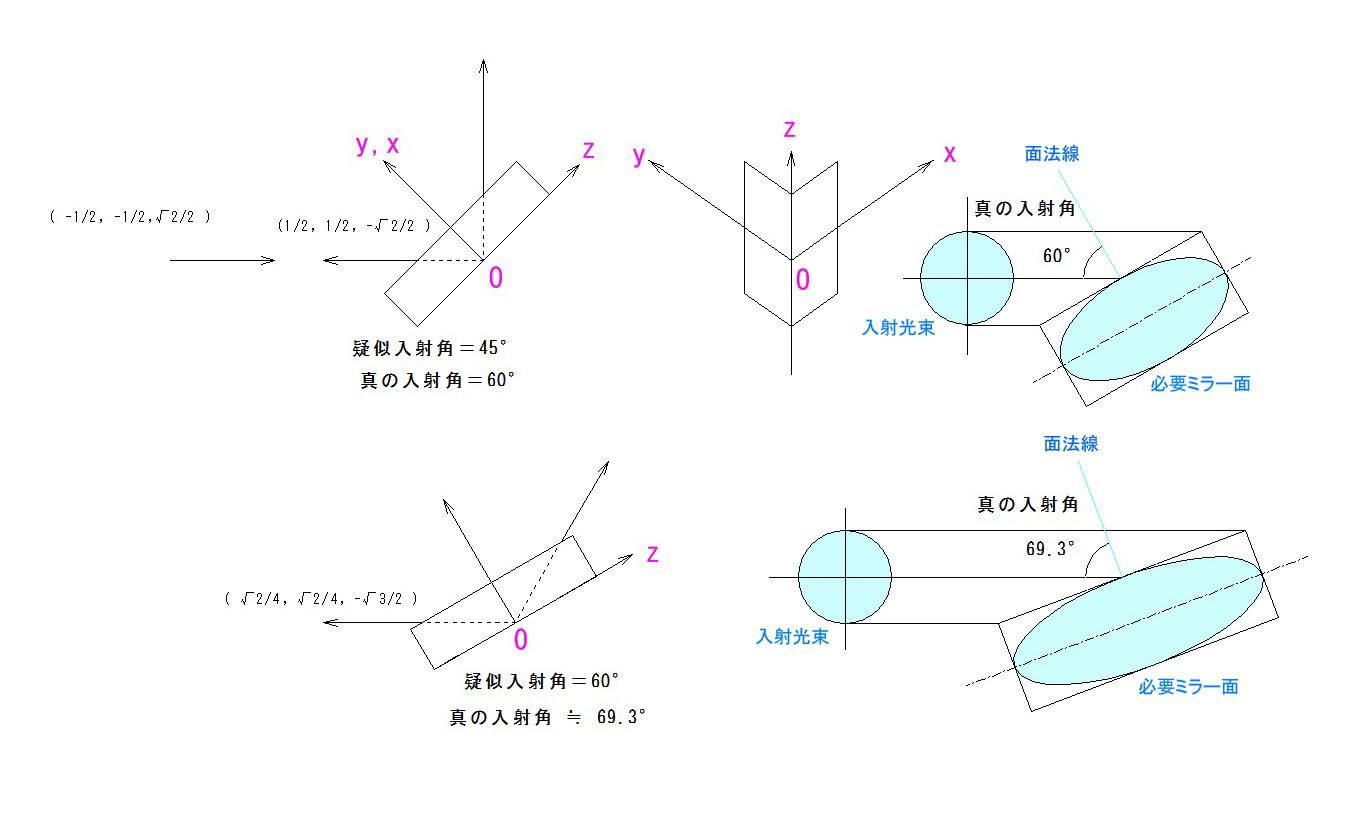
アミチプリズム等のご経験から、主光線の転向状態を把握する際は、ダハ面を通常の平面に置き換えて判断できることをご存じの方も多いかと思います。上図はその作図で、OZを通常の平面と考えて作図することが可能です。図の2枚直角鏡の原点に入射する光線は、平面鏡の場合と同じ経路を共有しますが、あくまで2回反射のシステムだということを忘れてはいけません。
図の2例とも、第1反射点に於ける法線の単位ベクトルは、y軸方向の単位ベクトル(0,1,0)もしくはx軸方向の単位ベクトル(1,0,0)、となるので、入射光線(の逆方向の)単位ベクトルとその法線ベクトルの内積から入射角を求めると、疑似入射角45°の通常のEMSの場合の真の入射角=60°、疑似入射角60°のEMSの場合の真の入射角=69.3°となります。
このように、対空角度を90°から小さくするほどに、急激に要求ミラーが長くなるということです。
もっとも、本例の対空角度=60度くらいまでなら、実現不可能とまでは言えず、イメージサークルさえ少し妥協すれば作れないこともありません。 ただ、45度対空ともなれば、あまりに犠牲が大きくなると言わざるを得ません。
以上、理論的な話をしましたが、そもそも、そうした犠牲を払ってまで、45度や60度のEMSを作る必要があるのか?ということです。
大方のそうした要求は、誤解とバイアスの結果だからです。
90度対空に適した架台高というものがあるのです。よく、「低空は45度対空や直視が圧倒的に楽に見える!」と言われる方があるが、それは、90度対空のシステムに、45度対空、もしくは直視に適合した架台や三脚をそのまま使用しているからだと断言できます。
皆さん、高学歴の方ばかりで、机の上でしっかり勉強して来られた方ばかりと思いますが、デスクトップ上でノートをまとめたり、読書するのに、苦痛を感じていたのでしょうか?
その姿勢こそ、まさに90度対空型の光学系で地平方向を見る姿勢です。
そうです。90度対空のEMSで低空が見にくい、というのは、完全に架台の設定高を間違えたことによる判断ミスであり、バイアスに他なりません。

Ashizu-Valley is located about an hour drive south of Tottori city.
I was drowning in work, but kind sister-in law and her husband invited us to this half-day relaxation.
振り返ると、苦笑するほど何処にも行かず、ストイックに仕事に追われる人生でしたが、最近、義理の妹夫妻が、息抜きに近場の散策に誘ってくれます。昨日は、鳥取市から南、車で1時間程度の所にある、”芦津渓”(智頭町)付近を散策させていただいた。

旅程の中間点くらいにある、”ハング(パラ)グライダーのメッカ”として全国的に有名な、霊石山(標高334m)。
山を遡る気流や眺望に恵まれているらしい。

義弟の運転なので、車窓からパチり。

もっと奥がありそうだったが、深入りはしなかった。(時間的に)^^;

ありゃ、マスク外すの忘れとる。コロナ禍も去ったし、花粉症でもないのに、習慣とは恐ろしいもの。ただ、マスク、携帯加湿器みたいで快適なんだよな。

完璧な快晴だ。「空に広げたレース模様のようだ!」と、智頭杉の木立を妻がパチリ。

”みたき園”という山菜料理屋さんの別小屋の売店が山道脇にあったので、買い物がてら、しばし休憩。

売店のすぐ奥が広い庭園になっていて、小さい滝も演出してあった。
妙に人懐っこいニワトリが二羽じゃなく、5羽くらいいた。^^;
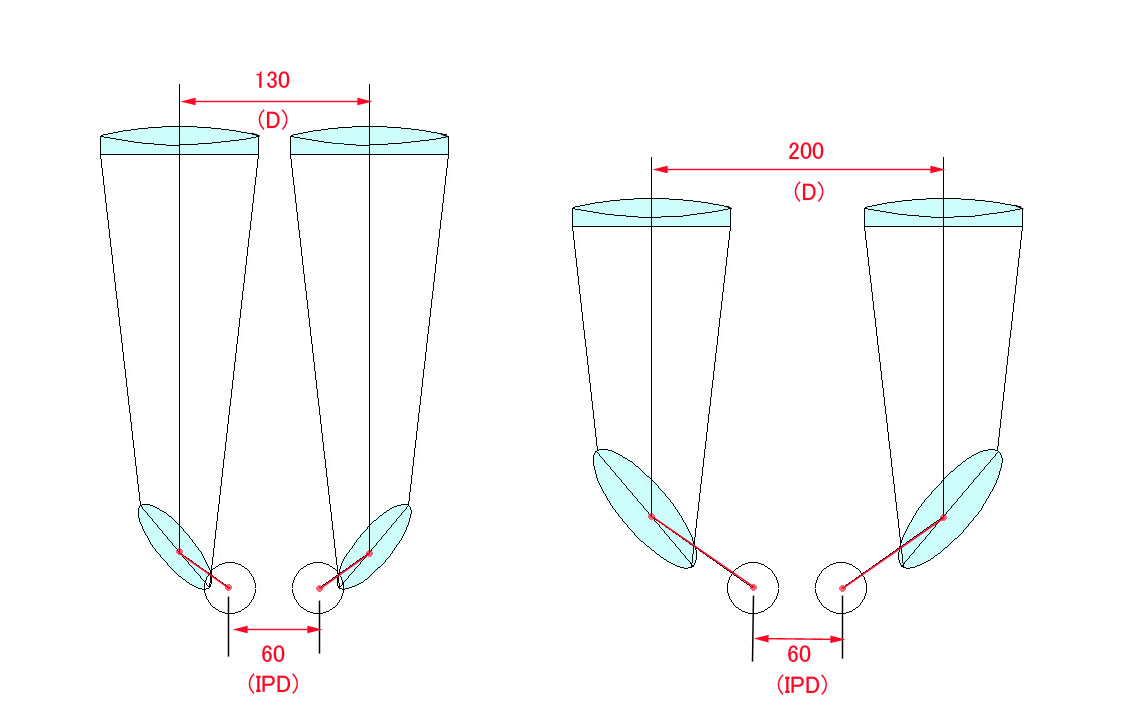
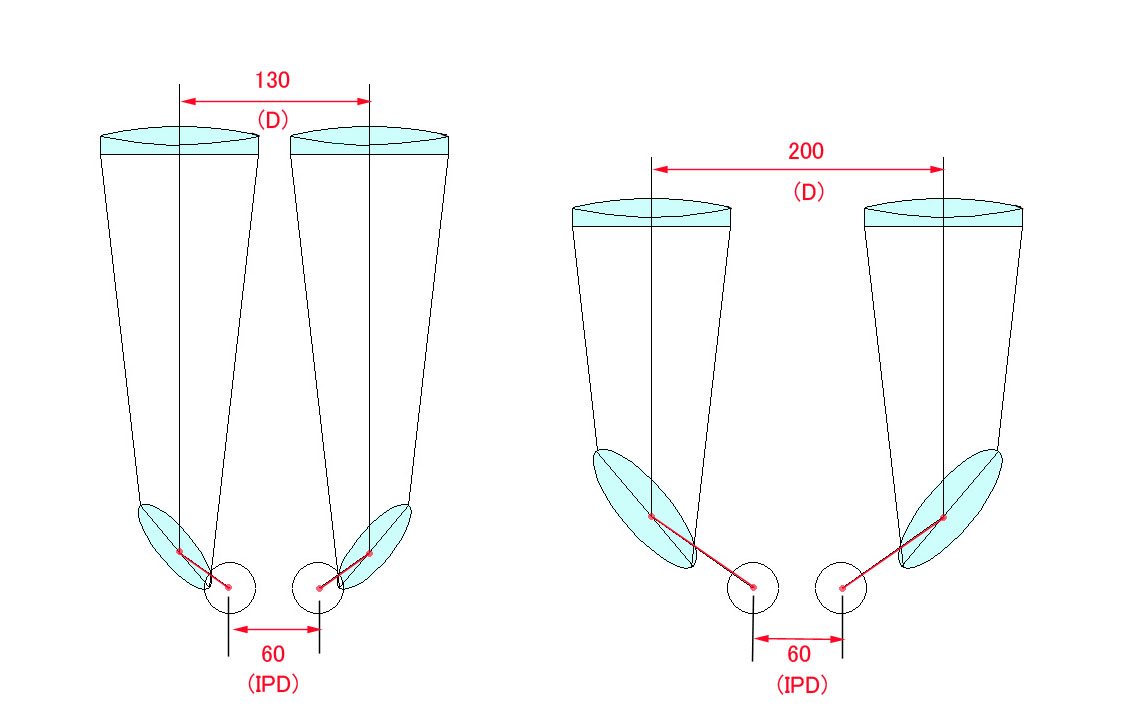
分かる方にとっては、「何を今さら?」の内容だと思いますが、分からなかった方にとっては、EMS-BINOを理解する突破口になる図かも分かりません。
31.7サイズアイピースしか使わないならEMS-UMA、2インチアイピースを使用するならEMS-UL、という、短絡的な理解は、BINOのプランニングには通用しません。
上の図は、同じ対物レンズ(F値、口径、焦点距離、全て同じ、目幅も60mmと想定)で、D(鏡筒間隔)が変化した時の、第一ミラーの理想サイズの変化を図示したものです。
Dが少しでも大きくなると、第一ミラーの要求サイズが急に大きくなることがお分かりになると思います。これが、BINO設計の初期段階で、Dをミニマムにすべく、最大限努力することの理由です。
「私は31.7アイピースしか使わないから、EMS-UMAで良い!」と、頑迷に主張される方もあって、その場合は、ご当人が気付くまで、仕方ありません。^^;
大方の望遠鏡メーカーさんの理解レベルも大体そんなもので、単体のEMS-ULクラスで合焦すれば、BINO化も可能だと思っている節があります。
”内積”と聞いただけで逃げ出す日本人が多すぎる!
その食わず嫌いで、多くの損失を被ることになりますよ、一生を通じて。
内積とは、ベクトルの対応成分を掛けて合計したものです。
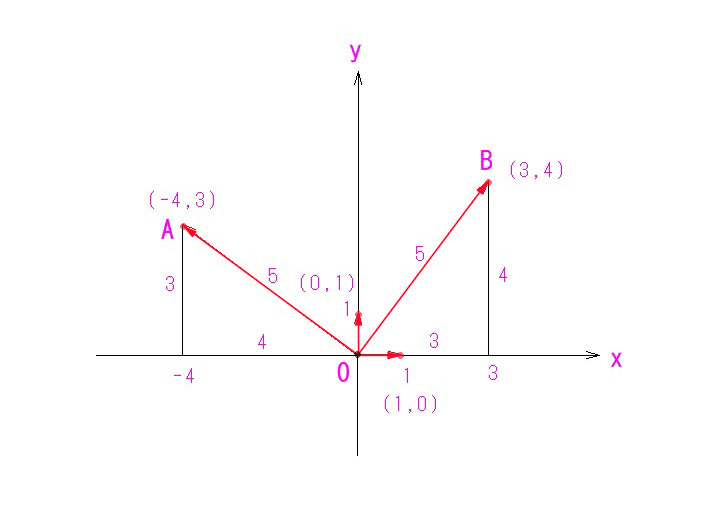
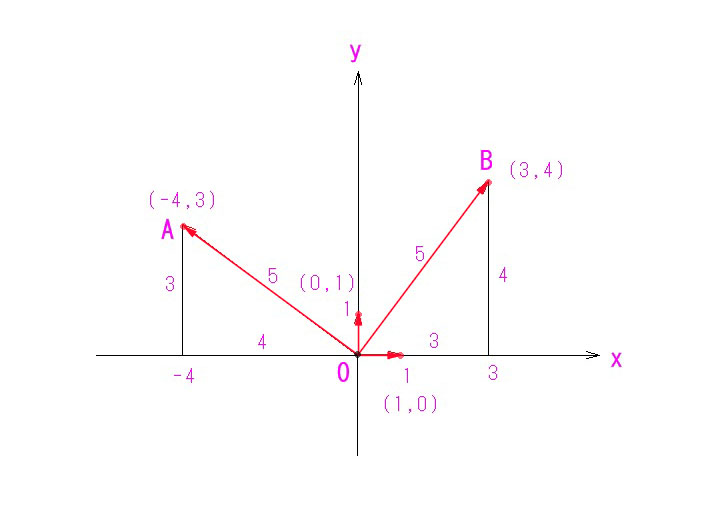
まず、x軸方向の単位ベクトル(1,0)と、y軸方向の単位ベクトル(0,1)の内積を求めてみましょう!
1×0 + 0×1= 0 で、内積=0 です。
次に、ベクトルA(-4,3)とベクトルB(3,4)の内積を求めましょう。
-4×3 + 3×4 = 0 で、これも内積=0 です。
そうです。直交する2つのベクトルの内積は、常に0になるのです。
3次元の任意の2つのベクトルA(a1,a2,a3), B(b1,b2,b2)も同じ計算方法で、
A・B(内積)=a1×b1 + a2×b2 + a3×b3 で、直交していれば、値は常に0になります。
どうでしょう? 内積って簡単ですよね。 さあ、気を取り直して、昨日の講座をちゃんと読んてみてください!