正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
カテゴリー: Diary
I think my web-diary is a bottle-mail to be thrown into the cyber ocean.
I believe there must be someone in the world who shares my feelings with. I do not intend to debate on anything with anyone.
I welcome the favorable e-mails only. e-mail FACEBOOK
You can see the older posts at the Internet Archives,too
Webの大海に流す瓶入りの手紙、そんな感じでWEB日記を書いています。共感いただけたらメールをください。
Debate をする気はないので、反論のメールは要りません。^^;
よろしければ、FACEBOOKもご覧ください。
古い投稿は、ネット・アーカイブでもみられます。
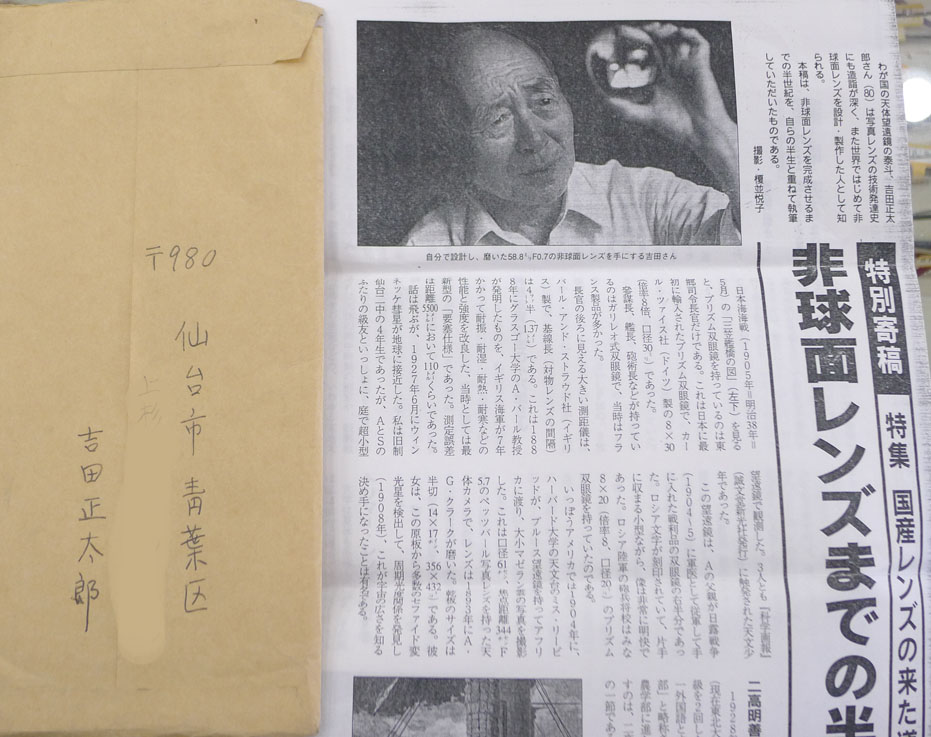
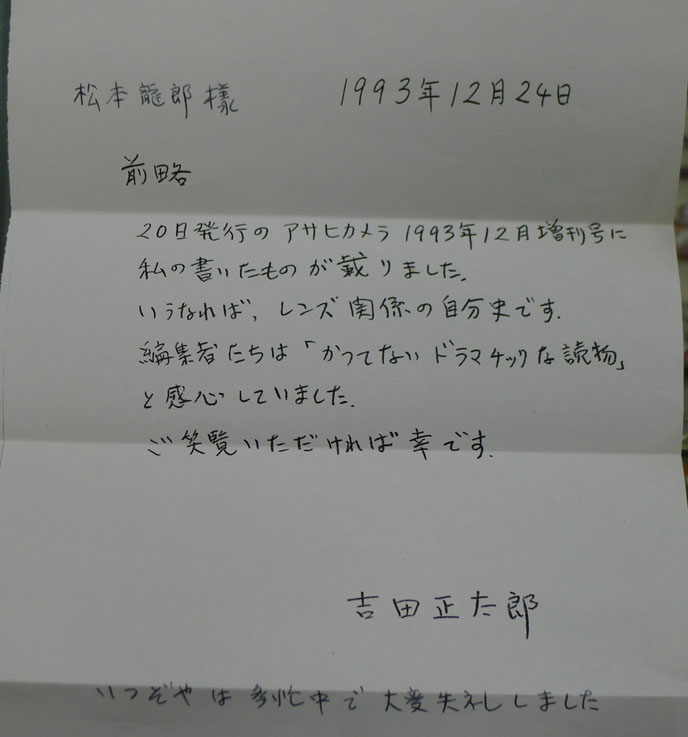
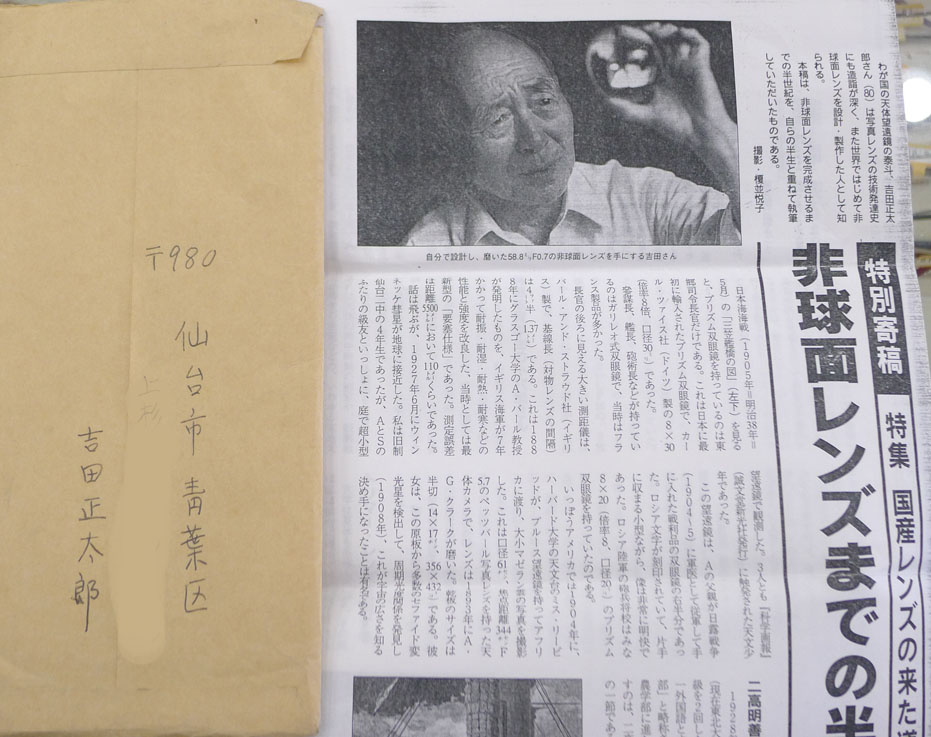
I recently found an old letter from a gap in the bookshelf. The sender was Dr. Shotaro Yoshida who was the pioneer of the lens design before and in the midst of WW-2. Though he was 9 years older than my Father, he never lost the purity and curiosity about Optics through his life. He passed away at the age of 102, in 2015, which was 2 years after my father passed away.
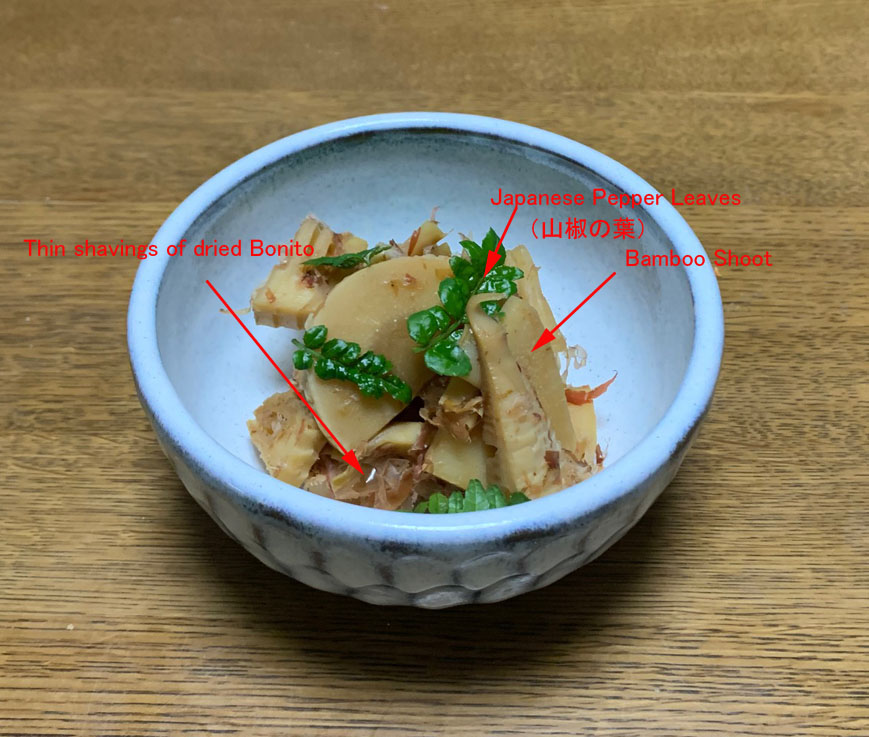
“Takenko”(Bamboo Shoot) is one of the seasonal food of Japan. But I know it was not regarded as food along with the algae by Western People. The episode of Japanese lieutenant accused by the WW-2 prisoner at Tokyo trial of the abuse of feeding him with the Bamboo-Roots eloquently show how the Bamboo Shoot was regarded by the Western people. Nowadays, there may be more western people who know the ethnic Japanese foods such as “TAKENOKO”. 筍を頂いた。引き抜いたままの物ではなく、すでに茹でてあく抜きまでしてくださっていた。 山椒の葉は、家内が庭で栽培していたもの。旬の味と香りを堪能させていただいた。 欧米では、筍は、海藻と並んで、食べ物とは見なしていなかった食物なんだけど、最近の日本食ブームで事情は少しは変わったのかな? 第二次大戦中に、捕虜に筍を食わせたことで、戦犯告訴された例が有名ですよね。^^;