
EMS-UMB for the single use completed !


Innovation of Astronomical Telescope
正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.

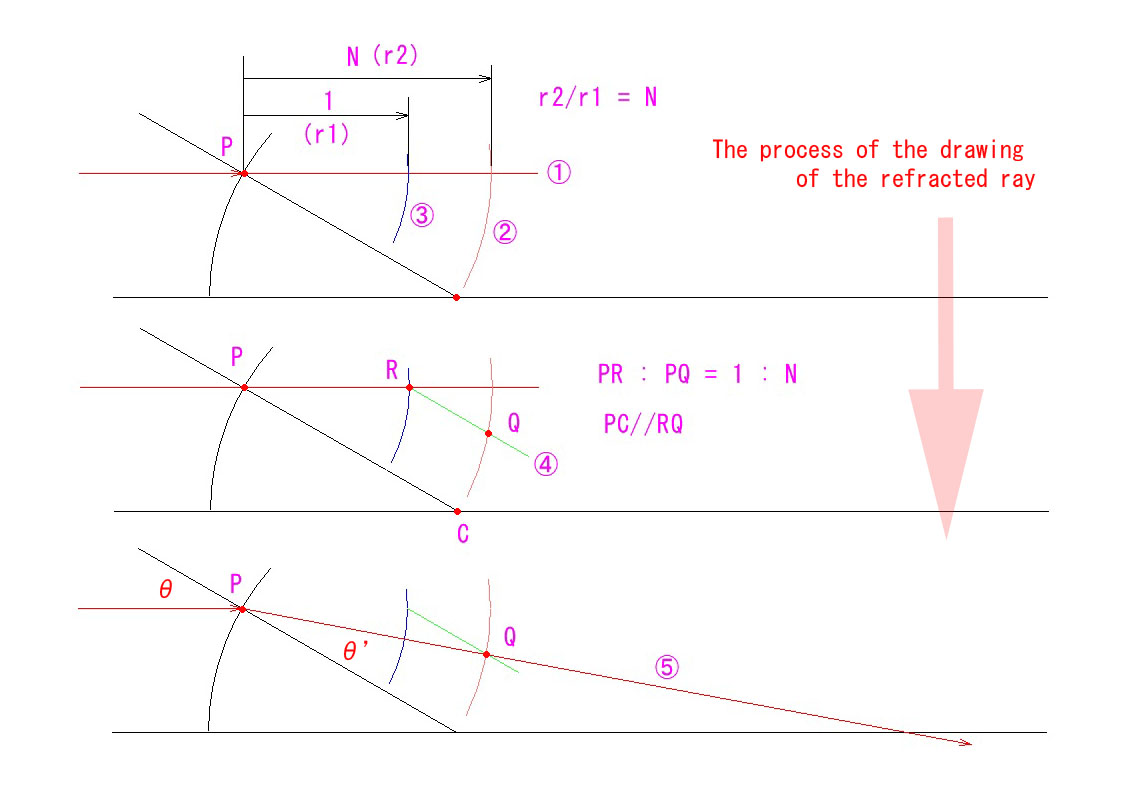
一々 sinθ やsinθ‘ を計算しなくても、純粋に幾何学的な方法だけで、かなり正確に屈折光線を作図する方法があります。
入射光線は最初から長めに描いておきます。—-①
すると、➁、③ の円弧と➃の補助線の、合計3つの補助線を引くだけで、屈折光線が決定できます。
①と③ の交点 R から、PCと平行に補助線 ➃ を引きます。
➃ と 弧➁ の交点を Q とすると、PQ ⑤が求める屈折光線になります。

長文を書いても、ほぼ読んでくださらないことが分かったので、図に可視化してみました。
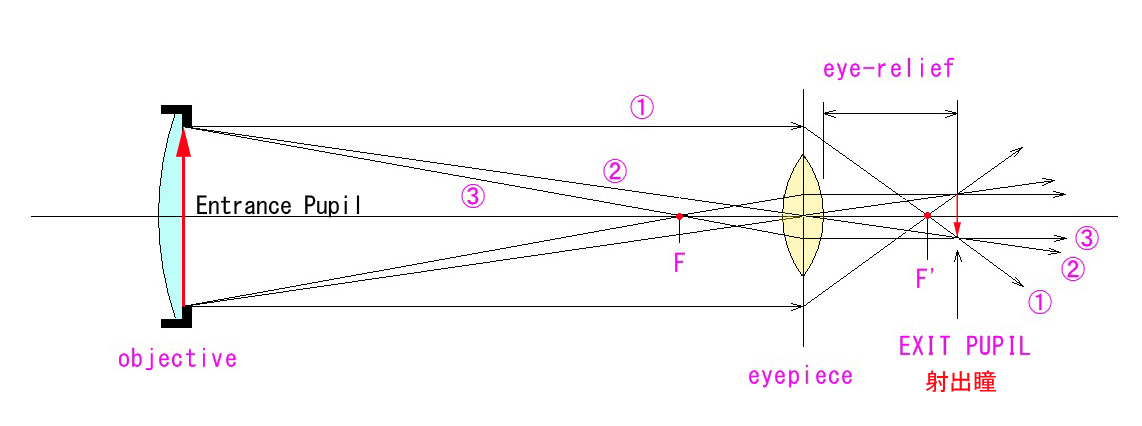
”射出瞳”を一言で言うと、”接眼レンズが作る入射瞳の実像” ということになります。
言い換えると、「接眼レンズによる対物レンズ自体の実像」です。
①の光線は実在しませんが、光路図に描いても問題なく、むしろ考察に有効です。
Fは、アイピースの物側焦点であり、かつ対物レンズの像側焦点でもあります。
F’は アイピースの像側焦点。
対物レンズ枠は、アイピースにとって有限距離にあるので、常にその像側焦点 F よりも外側に結像します。この図でお分かりのように、対物レンズ枠がアイピースに近いほど射出瞳は外側に出るわけで、実は、アイレリーフは固定されたものではなく、対物レンズの焦点距離によって微妙に変化します。(対物の焦点距離が短い方がアイレリーフが長くなる。)
この図から、望遠鏡の倍率=入射瞳径/ 射出瞳径 となることにもご納得いただけたと思います。
もう一度、図の入射瞳(Entrance Pupil)と射出瞳(Exit Pupil)の関係をよくご覧ください。
入射瞳の環の中をくぐる光線は、ことごとく、射出瞳の環の中から出て行く! ということです。
ここに観察者の眼の入射瞳を置けば、対物レンズをくぐる光線をことごとく捉えることが出来るわけです。( 瞳孔径>射出瞳 が前提ですけどね) 眼の入射瞳は、角膜上ではなく、角膜が作る、解剖学的瞳孔の虚像で、角膜よりも眼の内部にあるため、角膜は射出瞳よりも前に位置しないといけません。一見十分そうなアイレリーフの公称値に反して覗きにくいアイピースが多い所以です。
いかがでしょうか? これで射出瞳の本当の意味がご理解いただけたでしょうか?
72年の人生を振り返って、天文に興味を持ち始めてからでも52年、あらゆる方と出会いましたが、射出瞳の意味を明瞭に理解している方と出会ったことがありません。
それは、教育界から天文マニア、望遠鏡業界を含めて異常なことだと私は思っています。
これで、「初めて射出瞳の意味が分かった!」という方がおられましたら、ご連絡いただけると励みになります。 また、教育界や望遠鏡業界の方で、”初めて分かった!”という方は、正しい知識の啓蒙に努めていただけますと幸いです。

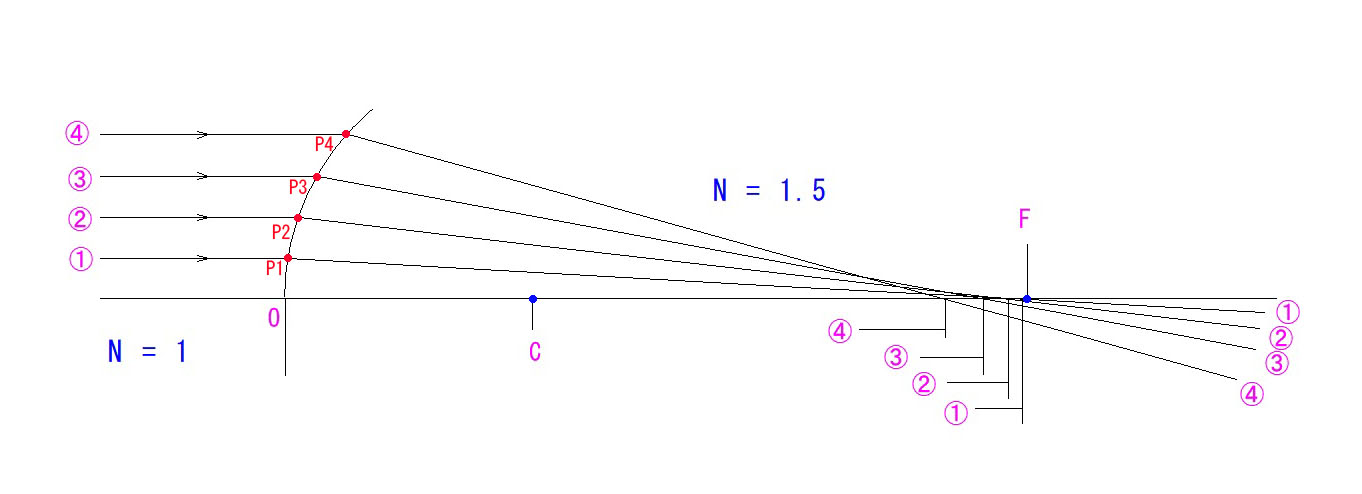
上の図は、界面カーブも屈折率も、見た通りの実際のシミュレーションです。
代数計算は全くやっておらず、光線追跡ソフトも使っていません。
若かった頃、実際に紙の上で、コンパスと三角定規を使ってシミュレートしていたのと全く同じ手法で、ただ、作図ソフトを使っただけです。(屈折光線の作図方法のヒントを2/17の記事に投稿しています。)
図の F が近軸、つまりPnが極限まで光軸に接近した時の焦点の極限値ですね。前回までの近軸追跡は、突き詰めると、このFを求めるのが目的でした。 実際の光学系の設計や性能評価には、高さのある光線の実際の経路を屈折の法則を適用しながら、克明に辿る必要があります。
今回は、1面のみのシミュレーションですが、単レンズでも2面、2枚玉なら4面あるわけです。
凸球面では、P点が高くなるほど、焦点位置が手前に来るわけです。
凹球面はそれを打ち消しますが、無作為に組み合わせても、パワーも打ち消してしまいかねません。同じパワーでも、エレメントのレンズの前後面のカーブの選び方(BENDING)でこの球面収差の量が変化することが分かっていて、凸レンズエレメントの球面収差を小さくして、凹レンズエレメントの球面収差を大きくすれば、合算した合成度数に+凸の要素を残しながら球面収差をキャンセルできるわけです。
Pnの座標は、二次曲線と直線の交点を求める課題なので、高校生の時に散々経験されているはずですし、また屈折光線のベクトルも、スネルの法則を忠実に適用すれば、高校生程度の数学で算出できます。無料の良いソフトが入手できる昨今ではありますが、近軸と簡単な光路追跡くらいまでは、マニュアルで辿ってみるのも、光学を理解する上で有効だと思うわけです。
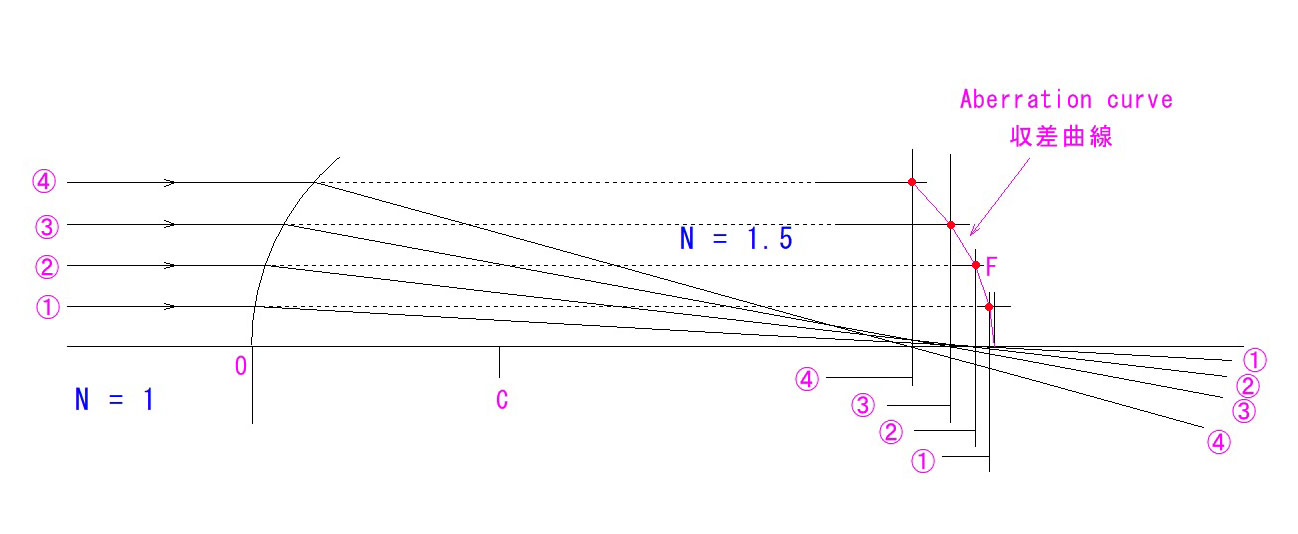
オマケで、収差曲線を追加しました。
図から、収差曲線の意味を直感的にご理解いただけると思います。


今は電卓どころか、良い計算アプリもあり、エクセルを利用するも良し、なんですが、知っておいて損はない計算のコツっていうのもありますね。
501 × 499 = ? 暗算に長けている人、珠算に長けている人は瞬時に解かれると思うけど、一般の人は、瞬時に暗算できる方は少ないと思う。
でも、昔習ったはずの2項の積の公式を思い出せば、簡単だと分かります。
501 × 499 = (500+1)(500-1) = 500^2 -1 = 249999 となります。
(a + b)(a – b) = a^2 – b^2、
とか、(a + b)^2 = a^2 + 2ab + b^2、とか、
学生時代に散々やられたのではないですか?
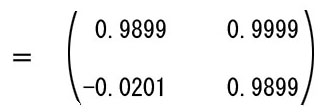
上に、先日の課題のシステムマトリックスを表示していますが、その行列式を計算するに当たって、
まず、0.9899 x 0.9899 がありますね。
これも、0.9899 = 0.99 – 0.0001 と置くと計算が楽になります。
0.9899^2 = (0.99 – 0.0001)^2
={ (10^-2) (99-0.01) }^2
=(10^-4) (99-0.01)^2
=(10^-4) (99^2 -2×99×0.01 +0.0001)
≒ (10^-4)(9801 – 1.98) (末尾の0.0001は切り捨て)
=(10^-4)(9799.02)
= 0.979902
*(99^2 = 9801 は、暗記しておきましょう。)
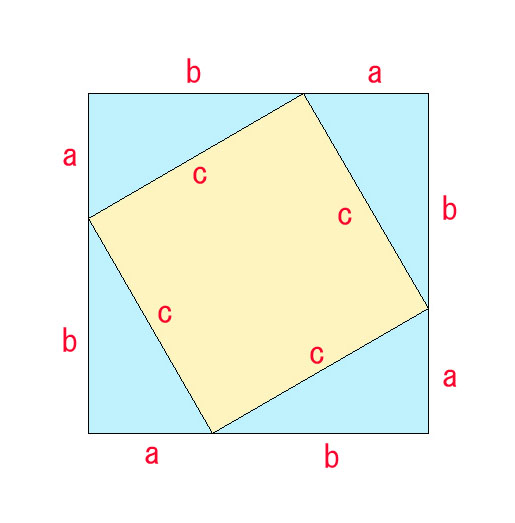
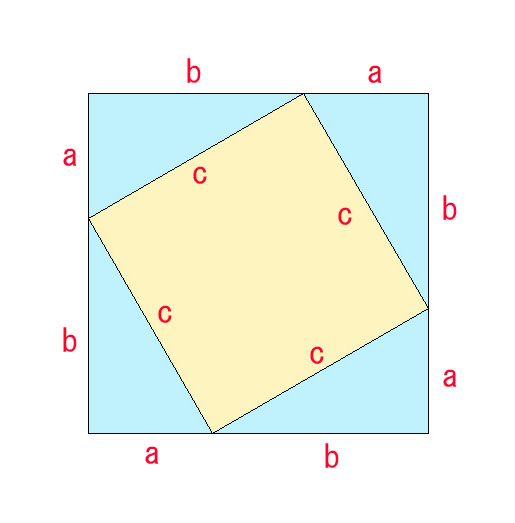
この定理も、幾何光学ではよく利用するので、空気のように身に付いていないと、躓いてしまう。
1. 大きい正方形の面積=(a + b)^2 = a^2 + 2ab + b^2
2. 小さい正方形(黄色)の面積= c^2
3. 水色の三角形×4の面積の総和 =(ab/2 )×4 = 2ab
(1) の面積(大きい正方形)から (3) の面積(水色)を引いたのが、小さい正方形(黄色)の面積だから、
(1) – (3) = (2)
つまり、(a^2 + 2ab + b^2) – 2ab = a2 + b2 = c2
このことから、幾何光学で極めて重要な定理である、
sin2 θ + cos2 θ = 1 も導かれる。
( 蛇足ながら、c=1 のとき、a = sin θ , b = cos θ )
なぜ、皆さん無反応なのだろう?と、知人(私より高学歴)に目の前で行列の計算(システムマトリックス)を手ほどきして、実際に紙の上でやってもらった。すると、案の定、数学以前の算術の段階で曖昧なことが分かった。
実は、この仕事を30年以上やって来て、おや?と思うことが多かった。
√(ルート)とか、sin(サイン)、cos(コサイン)が出ただけで、アレルギー反応を示して思考停止してしまう方があまりにも多すぎる。 皆さん、私よりも受験の関門を多くくぐって来た方ばかりなのに。
ハイテク機器を使いこなしている現代人の病巣は深いな、と痛感する。
こりゃあ、本当に 1 + 1 から始める必要がある。
1 + 1 = 2 ----①
両辺から1を引くと、
1 + 1 -1 = 2-1
整理して、1 = 1
①の左辺について、+1を”右辺に移項すると符合が変わる”と約束すると、
より効率的に計算ができる。
1 = 2-1 = 1
2 – 3 = -1 —-②
これも、2 + (-3) = -1 と考え、
-3を右辺に移項する。
2 = -1 + 3 = 2
例題:
2 + x = -1
x = -1-2 = -3
* (-1) × (-1) = 1 になるのはなぜ??
1 + (-1) = 0
の両辺に(-1) を掛けてみる。
(-1)×1+(-1)×(-1) = 0
-1 + (-1)×(-1) = 0
∴ (-1)×(-1) = 1
掛け算
2 × 3 = 6
2を3回足す、(2+2+2=6) から6になる。
0.25 × 0.25 = 0.0625
掛けたのに、小さくなったぞ!!
左辺を (25/100)×(25/100) と書き直したら、納得いただけるかな?
あるいは、1/4 × 1/4 =1/16 (1÷16 =0.0625)
(私は数学者じゃないので、厳密な証明になっているかどうかは分からないけど、
一応、納得いただけたのではないでしょうか?)
意図的にスルーされている気もしますが、ここで終わるわけには行かないのです。
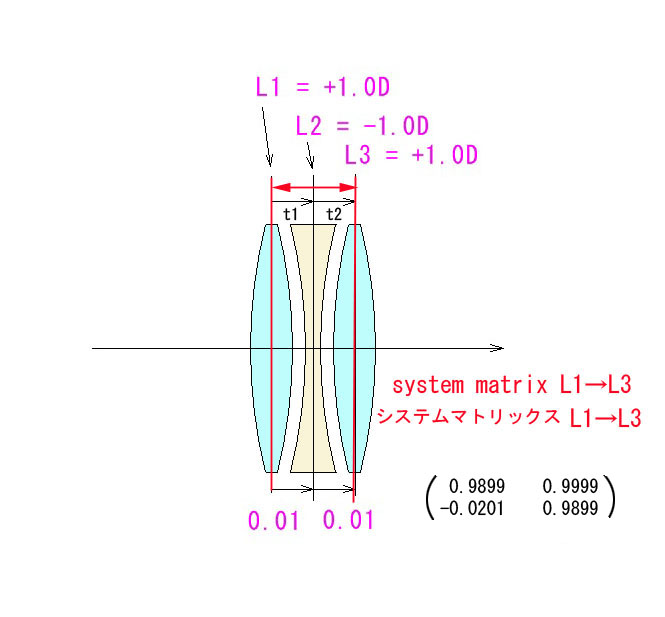
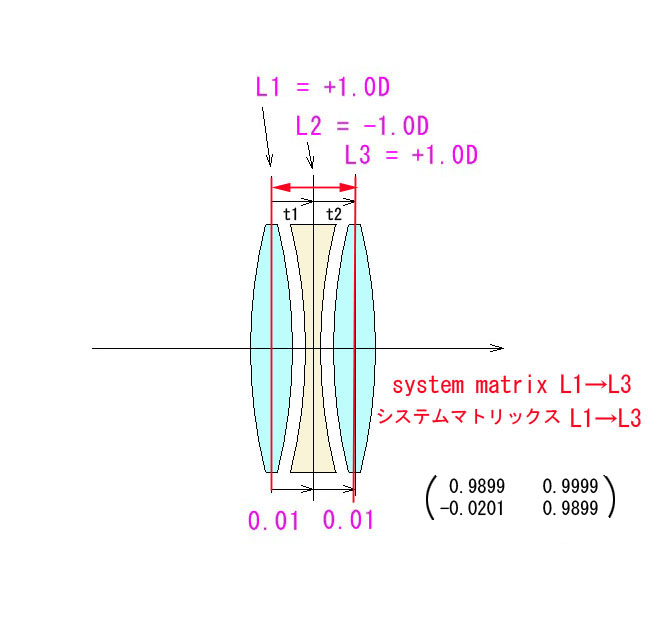
では、求めたシステムマトリックス(図中に記載 ↑)で何が分かるかについてご説明します。
まず、右上の成分 0.9999 から。合成パワー Φ(度数D)=0.9999D なので、
焦点距離=1.0001m (1000.1mm) ( f = 1/Φ )
エレメントの度数に対して、この程度のレンズ間隔だと、合成度数に関しては、ほぼ密着と考えて単純に3枚のレンズの度数を合計したのと、ほとんど変わらないことが分かりますね。
L1 から、+1-1+1=+1 。
次に、主点位置を見てみましょう。
以前にもご説明したように、システムマトリックス、
B A
C D の物側主点 E=(B-1)/A 、像側主点 F=(D-1)/A により、
E = (0.9899 – 1)/0.9999 = – 0.01010101 = F となります。
( – ) が付いているのは、レンズ面よりも主点が中側にあることを意味します。
ミリで言うと、約10mmレンズ系内に入った所なので、ほぼレンズ系の中央に、物側、像側の主点が位置していることになります。L2の凹レンズの中心ですね。
では、次に、中央の凹レンズ L2 を除去したレンズ系のシステムマトリックス(図中 ↓ に示しました。)を見てみましょう。(各自で行列式を立てて計算してみてくださいね。)
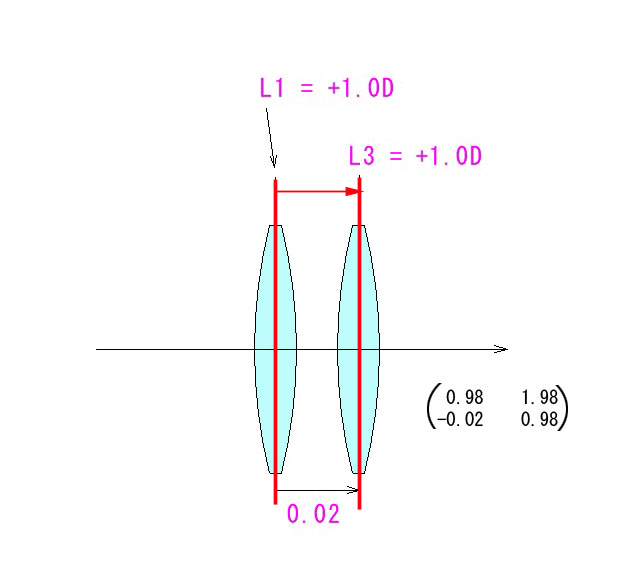
こちらの物側主点 E 、像側主点 F は、
E = (0.98 – 1)/1.98 = – 0.01010101 = F
となり、何と、前問と全く同じ数値が出るではないですか!
このように、完全シンメトリックな3枚玉の中央のレンズを除去しても、主点の位置は変わりません。
合成度数=1.98Dで、+1.0Dのレンズを2枚、20mm開けて配置したために、密着時の+2.0Dよりも度数がわずかに弱まりましたね。焦点距離では約 505mm。5mmほど長くなりました。
このように、システムマトリックスを見ると、その光学系の顔が見えてくる。
面白くないですか??
次に、元の3枚玉のシステムに、左から光軸に平行で、高さ h=1 の光線を投入してみましょう。
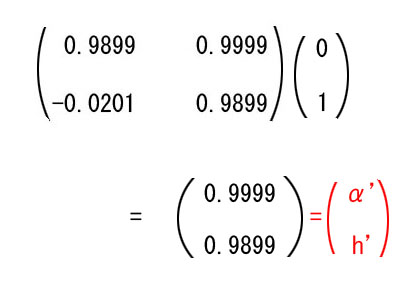
計算の約束上、左から投入する光線の行列は、システムマトリックスの右側に配置することになります。
α=0 で、h=1 の入射光線です。
それを計算すると、α’ = 0.9999 , h’ = 0.9899 となります。
これが何を意味するかと言うと、
L1面に高さ h=1 で投入された光線が、L3面上の高さh’ =0.9899の点から、傾斜角α’ = 0.9999の角度で射出するということです。
最終面L3とその結像点(焦点)までの距離 s’ =h’/α’ だから、
s’ = 0.9899/0.9999 = 0.989999 (m) となるわけです。
さきほど求めた焦点距離より10mmほど短いですが、これは、焦点距離ではなく、像側の頂点距離で、焦点からL3面までの距離です。
これに、像側主点までの距離を加えたのが焦点距離ですから、今までの計算結果と合致しますね。
(*投入する光線の h の初期値には制限はありません。途中で尺度を変えない限り、x 軸の尺度と統一する必要はありません。(理由は前の講座を辿っていただくと見つかります。))
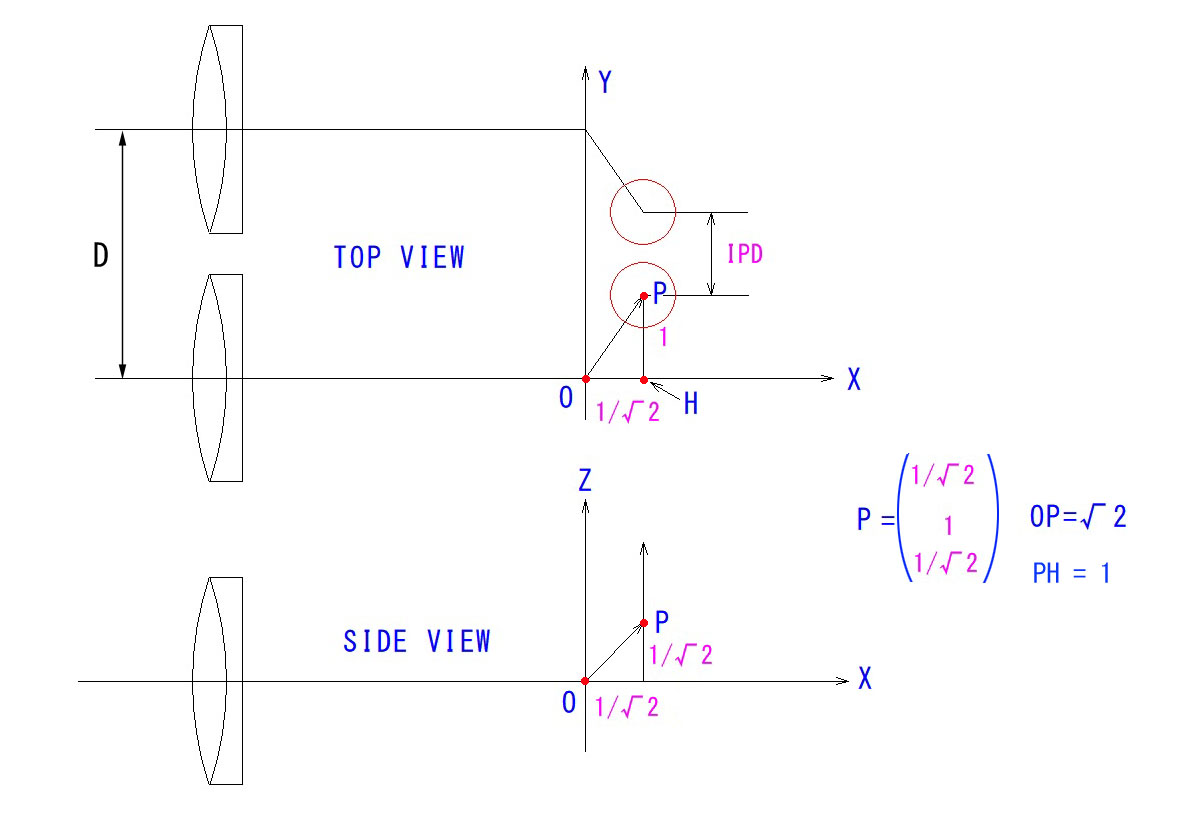
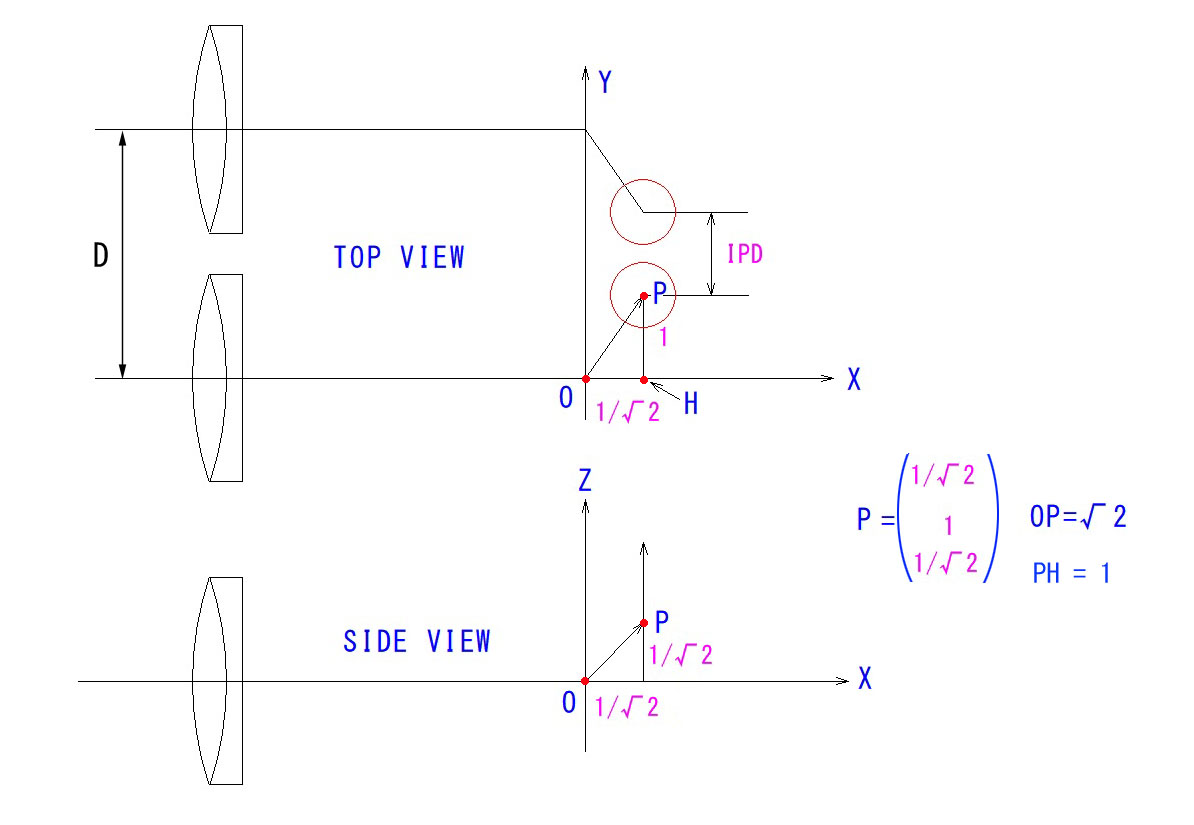
EMSの横シフト量と光路長の関係がよく分かるように可視化しました。
空間のことについて、2次元で考えていても埒が明きません。
X-Y-Z 座標で考えましょう。
OはEMSの第1反射点で、座標軸の原点とします。
PはEMSの第2反射点です。
Pの座標は、( 1/√2, 1 ,1/√2 )となるので、
OP= √ ( 1/2 + 1 + 1/2) = √2 になります。
つまり、横シフト量を1単位増やすと、光路長は√2増えるということになります。
逆に言うと、OPの実長の目幅方向への射影=OP/√2 ということです。
ついでに、
OP→とX軸の実角度 θ を求めてみましょう。
OP→ (1/√2, 1 ,1/√2) と X軸方向の単位ベクトル ( 1, 0, 0 ) との
内積=(1/√2)・1 + 1・0 +(1/√2)・0 =1/√2
2つのベクトルの絶対値の積=√2
cos θ =(1/√2)/√2 = 1/2
より、 θ =60° と分かります。