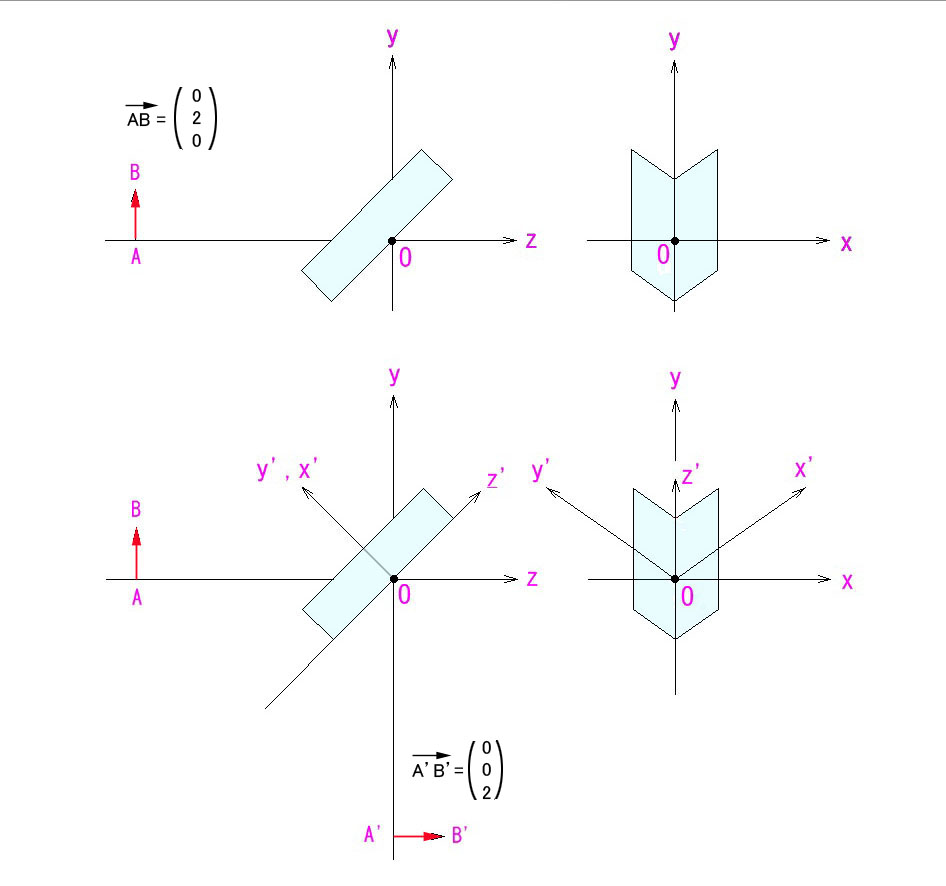
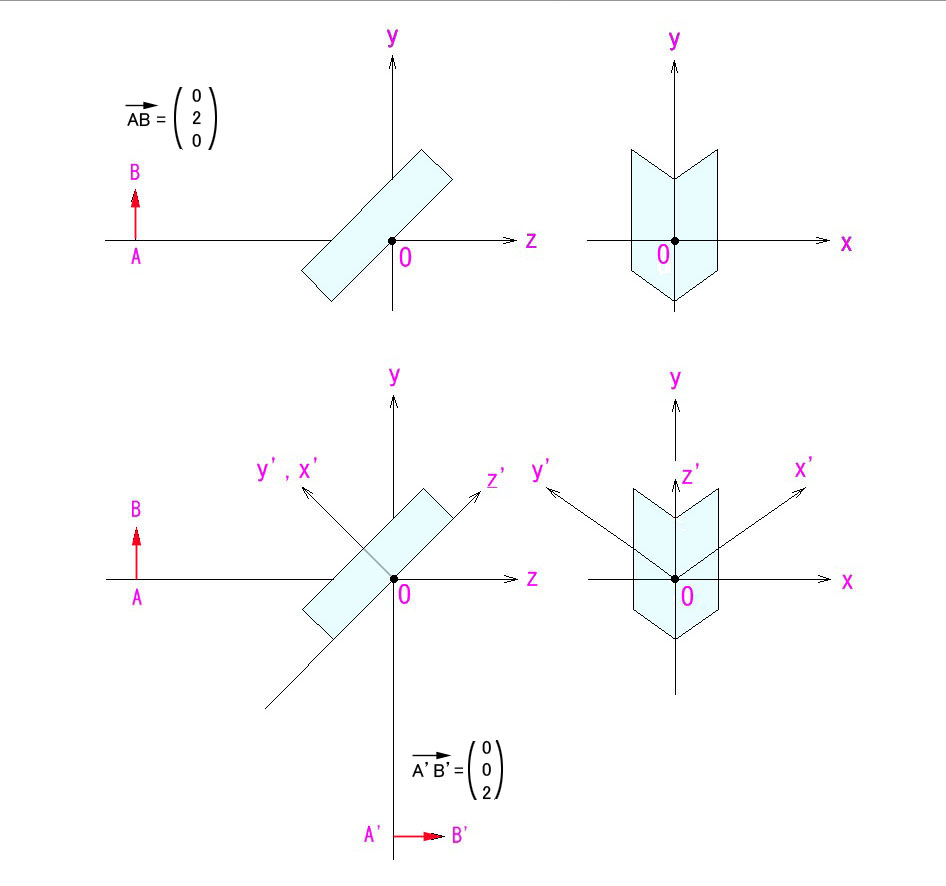
過去2回に渡って、像の向きの反転の様子を視覚的にご説明しましたが、今回は数学的に検証する方法をお示しします。
次回以降に、実際の行列計算を辿ってみることにします。
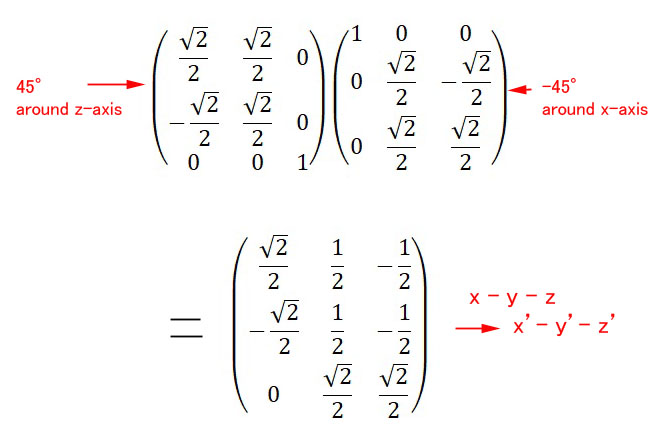
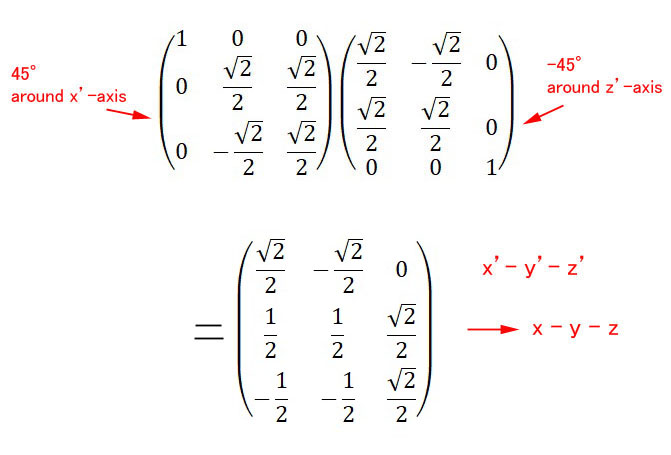
矢継ぎ早になりますが、実際に計算を辿ってみましょう。θ 回転させる変換行列は、θ sin θ θ cos θ θ sin θ 0θ cos θ 0
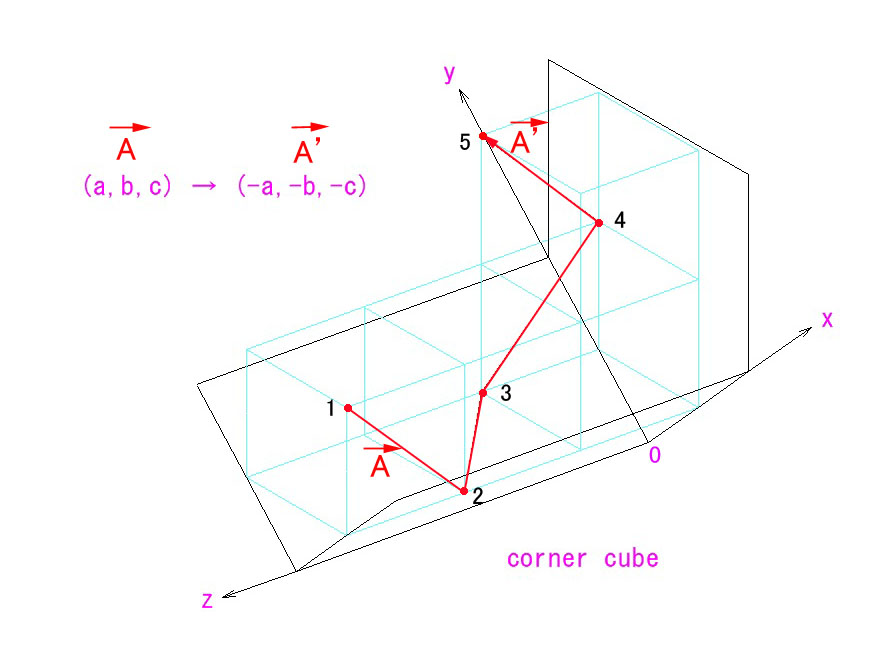
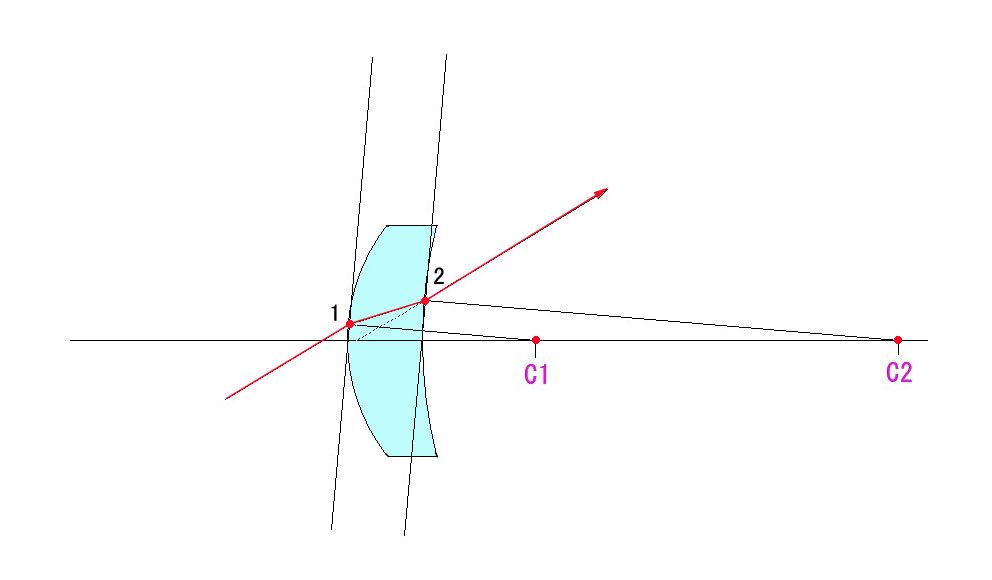
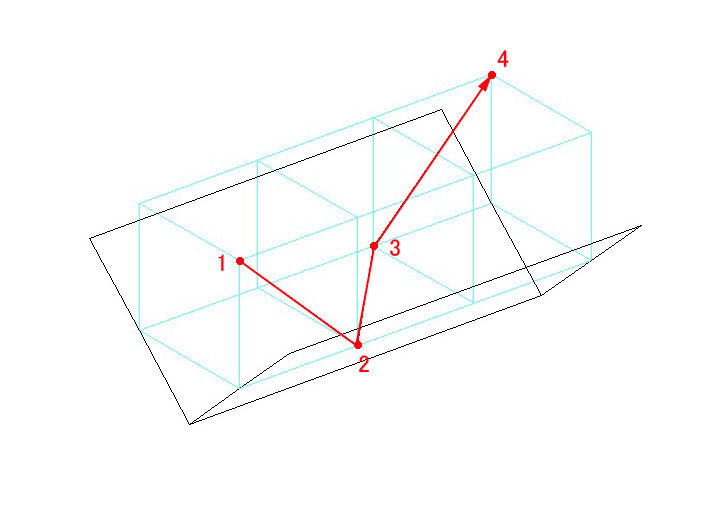
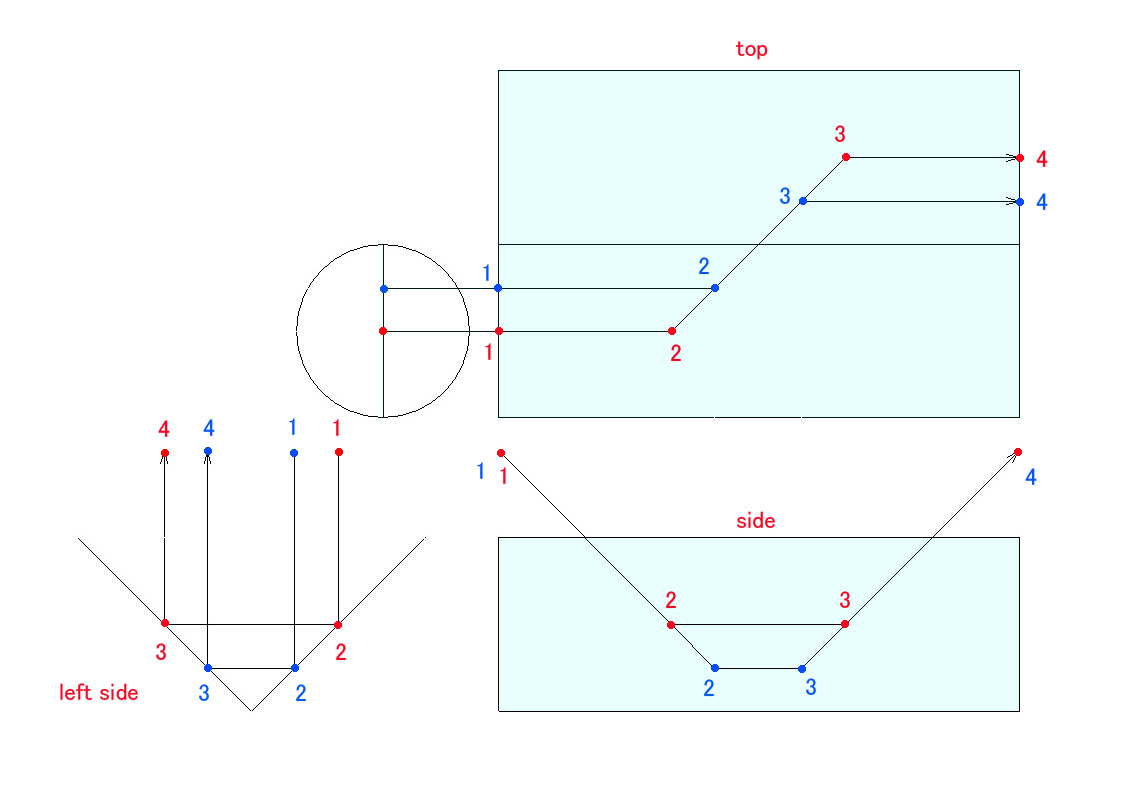
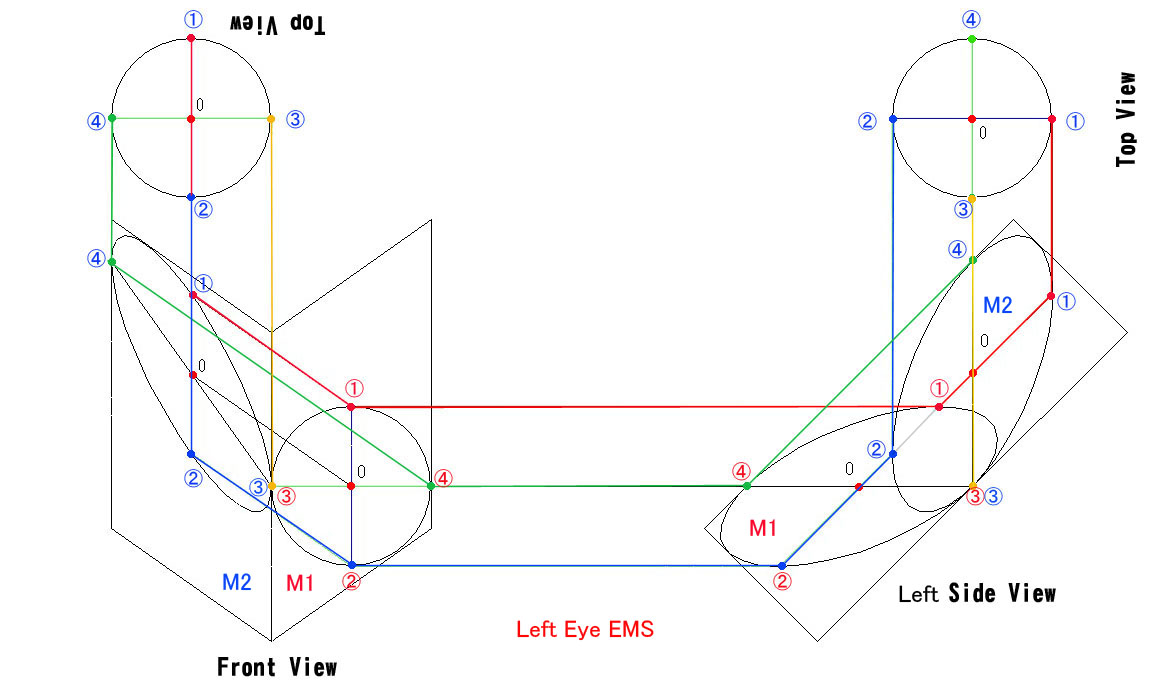
これが、上の図の座標軸 x-y-z を、x’- y’- z’ に変換する行列になります。
これが、図の2回反射後には、新しい座標軸で (-1,-1√2) になるわけです。
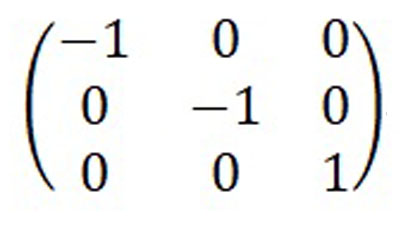
これが、x’-y’-z’ 座標での2回反射による変換行列です。
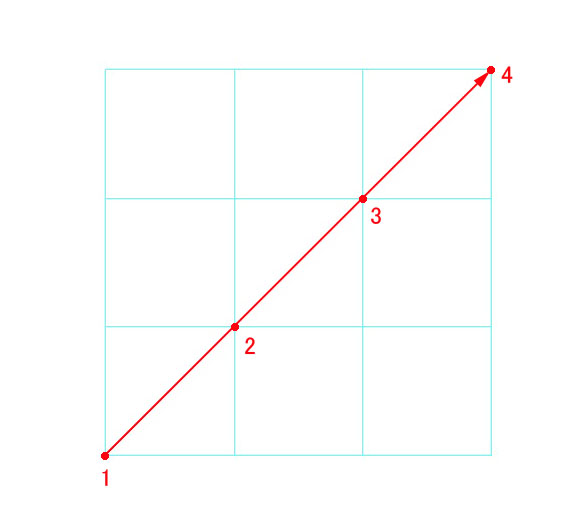
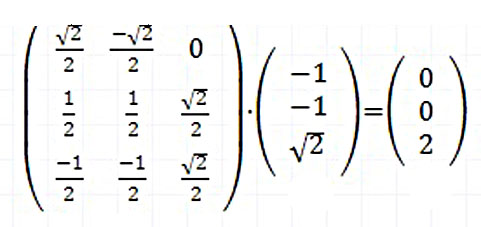
(-1,-1√2)が元の座標軸でどうなっているか、座標軸を元に戻して見ましょう。
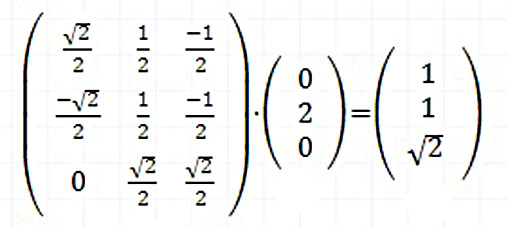
この行列を使って、さきほど求めたAB→の2回反射後のA’B’→のx’- y’- z’ 座標での(-1,-1√2) が元の座標ではどうなるか、見てみましょう。
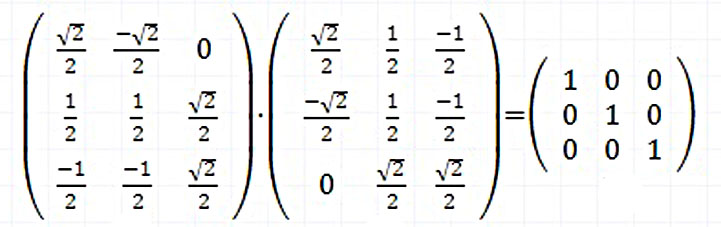
どうでしょう? ちゃんと予想した通りになりましたね。