
また、準備運動しましょう。
光線をその位置に於ける傾角と高さで表すと、非常に便利ですよ、というのが前回の講座でした。
では、実例に則して、概略をご説明しましょう。
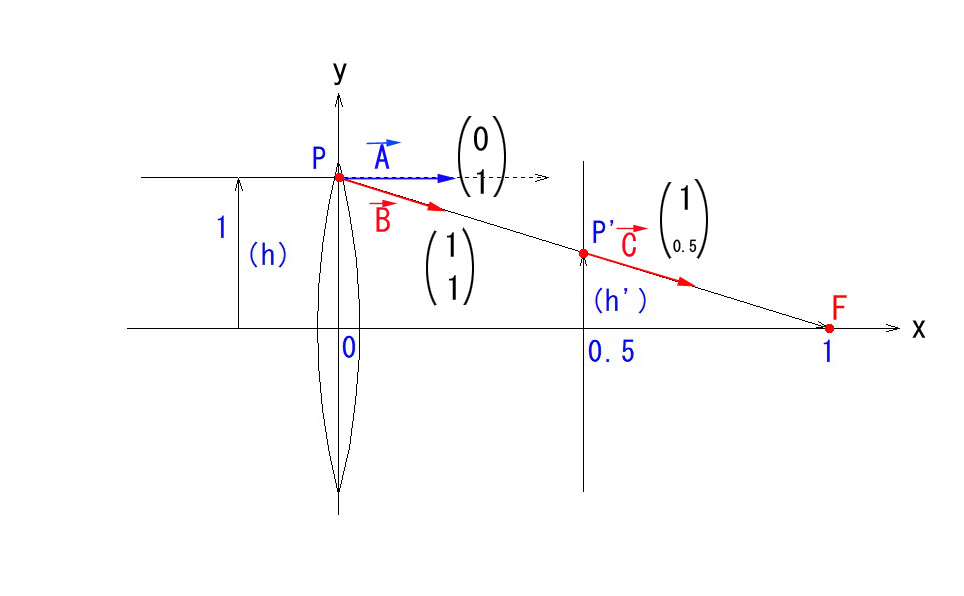
レンズは、厚さが無視できる、焦点距離1m(度数=1.0D)の凸レンズとします。
まず、X軸とY軸の尺度が違うことに気付かれたと思います。この辺も初心者にはハードルになりますが、近軸光線追跡に用いるXY座標は、X,Yの尺度を統一する必要がないのです。理由を話すと長くなるので、今回は詳細は割愛しますが、一般的な結像公式(1/S’-1/S=Φ)の両辺にhを掛けたことと同じですので、問題ないわけで、これが、この方法の強みなのです。
次に、P点での光線ベクトルが2つあるのにも違和感を覚えられたかも知れません。
屈折面では、瞬時に光線の方向が変わるため、同じ点に屈折前(A→)と屈折後(B→)の、2種類の光線ベクトルが存在するわけです。前回、位置ベクトルではない、と申し上げた所以です。
光線の進行を最初から辿ってみます。
1. 入射光線は、Y軸に一致した屈折面に、光軸に平行に、高さ 1 で突入します。
横に、α(傾角)とh(高さ)を成分とする 行列 A→を併記しました。
2. 光線は、同じ位置のまま、屈折して、光線ベクトル B→ に変化します。
これも、行列B→を併記しています。
3. この光線追跡方法の有用なところは、基準面をどこにでも設定できることです。
練習のために、レンズと焦点の中間点(X=0.5)に新たな基準面を立ててみました。
光線がPに到達した時、傾角は元のままですが、高さ(h)だけが半分になります。
これも 行列 C→ を併記しています。
今回は、(逃げられないように^^;)敢えて計算式を省きましたが、P 点では、レンズの 屈折マトリックス、P’では、X=0→0.5 の間の 移行マトリックス を掛けてやることで、新たな α と h が決定できるということです。
屈折マトリックス、移行マトリックス について、改めてご興味を抱いていただけましたら、講座の最初から見直していただけると幸いです。