
鏡筒に操作ハンドルを固定すると、フォーカサーの繰り出し量によって、ハンドルの相対的位置が変化します。さらに、中軸架台の横セットと、スライドマウントの平置きセットで望遠鏡アリガタの向きが90°変わることも難題です。
90φ差し込み用のエンドアダプターが非常に重厚な物になったので、ハンドルをセットできることが分かりました。 これなら、そうした難題を回避することが出来ます。

Innovation of Astronomical Telescope
正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
日英併記としましたのは、海外向けの他、国内の方にも、より多い情報量を効率良くお届けしたい(共有したい)からです。
両者は必ずしも同一内容ではございません。英語の方がよりストレートに表現できる場合もありますし、両言語で内容を補完し合っていることもございます。
FACEBOOKでは、よりリアルタイムな情報とユーザー様からのフィードバックが見れますので、そちらもぜひご参照ください。
Please check my FACEBOOK, too.
You can see the older posts at the Internet Archives,too.

鏡筒に操作ハンドルを固定すると、フォーカサーの繰り出し量によって、ハンドルの相対的位置が変化します。さらに、中軸架台の横セットと、スライドマウントの平置きセットで望遠鏡アリガタの向きが90°変わることも難題です。
90φ差し込み用のエンドアダプターが非常に重厚な物になったので、ハンドルをセットできることが分かりました。 これなら、そうした難題を回避することが出来ます。

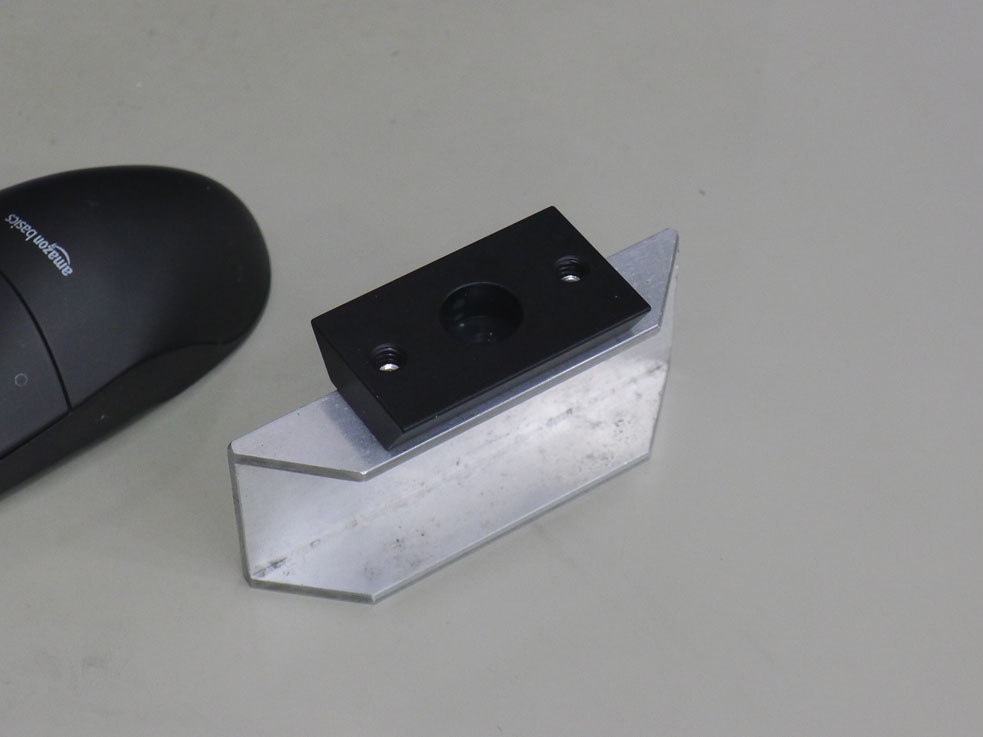
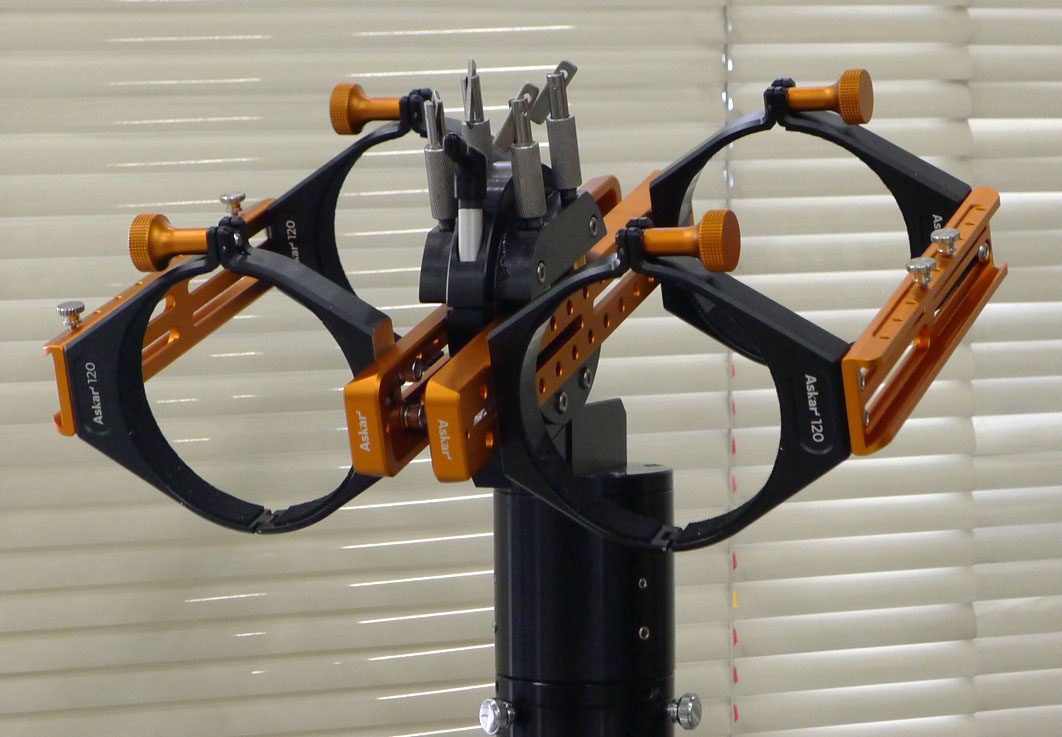
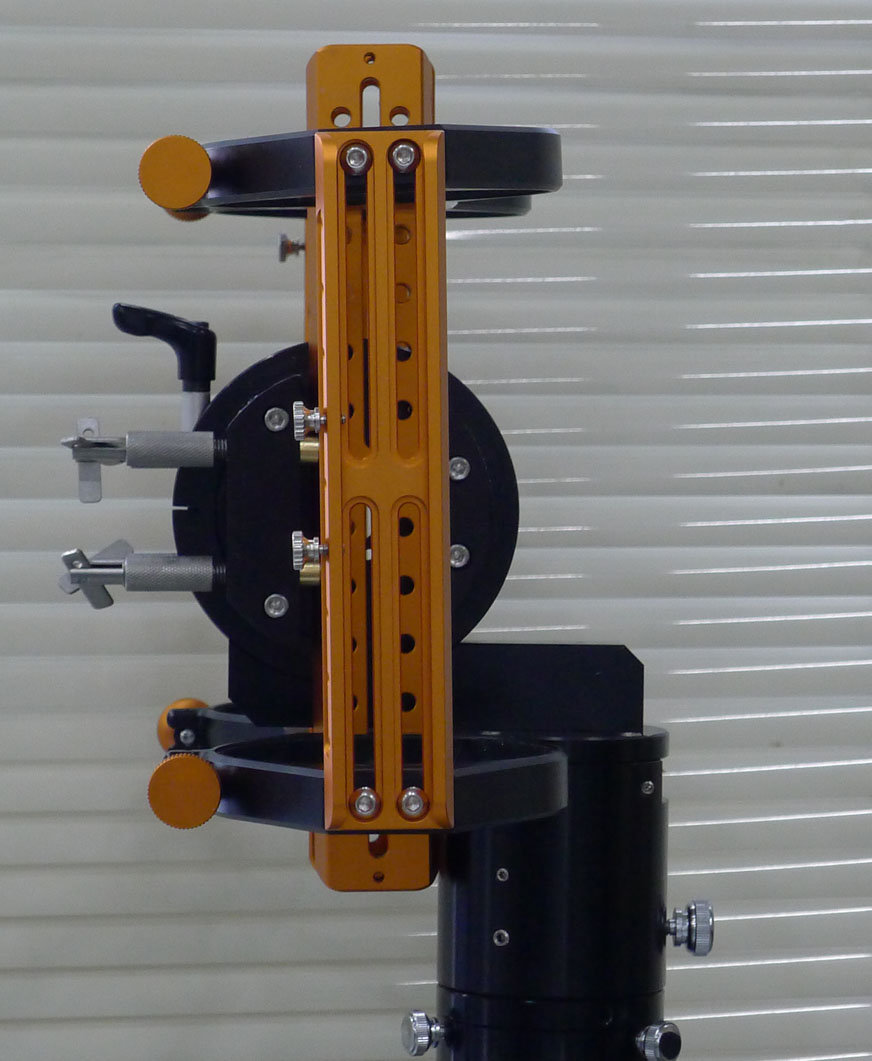
傾斜センサー取付用のブラケットを作ってみました。
左右どちらのサイドにもセットでき、セット位置も前後に大きく調整可能です。
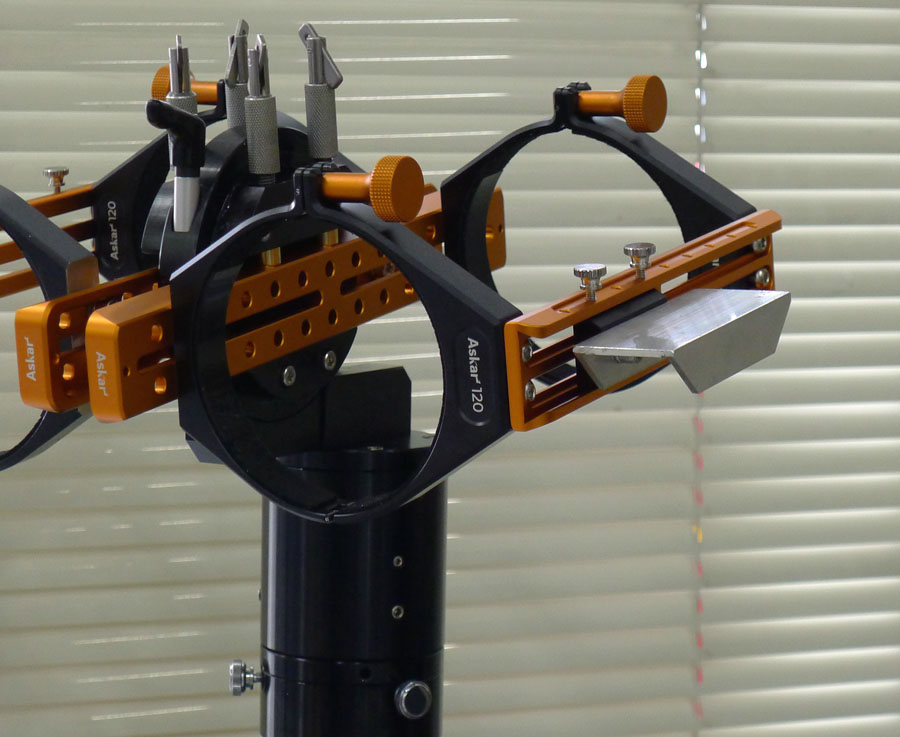
フォーカサーにファインダーベースをセットするのを、十年一日のように各メーカーさんが踏襲していますが、90度対空、特に双眼望遠鏡では、接眼部に近過ぎるんですよね。(頭がぶつかる!)
さらに、昨今のドットファインダーやレーザーファインダーは目の近くにセットする必要がない、と言うよりも、むしろ遠目の方が都合が良いのです。
ファインダーは複数セットされると思うので、手持ちのファインダーベースから、こんなのをセットしてみました。

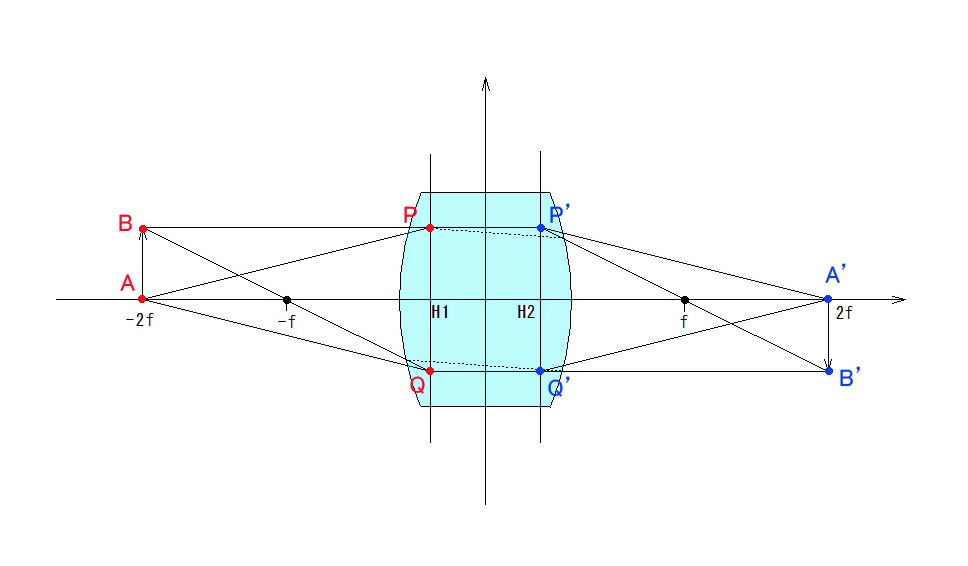
私も当初は、主点の意味が分からずに悶絶した経験があります。しかし、分かれば簡単な話でした。
AB→の像がA’B’→になることは、すぐにご納得いただけると思います。
しかし、Pの像がP’になる、と言われたらどうでしょう?多分、かなりの抵抗を感じられるはずです。
AからA’、あるいはBからB’に至る光線が、本来の物と像の結像関係とは別に、もう一組の結像関係を秘めているのです。A~Bまでの無数の物点についても同じです。
Pに収斂する光線の束は、全てP’から発散するように射出する、ということです。
実際には光線はPもP’も通りませんけどね。
これを文章で表すと、「主点(複数)とは、横倍率=+1 の共役点の組。」ということになるわけです。また、主点を通って光軸に垂直な面を、主面と言い、横倍率=+1 の共役面、というわけです。
因みに、図の物と像の関係は、横倍率=ー1 ですね。

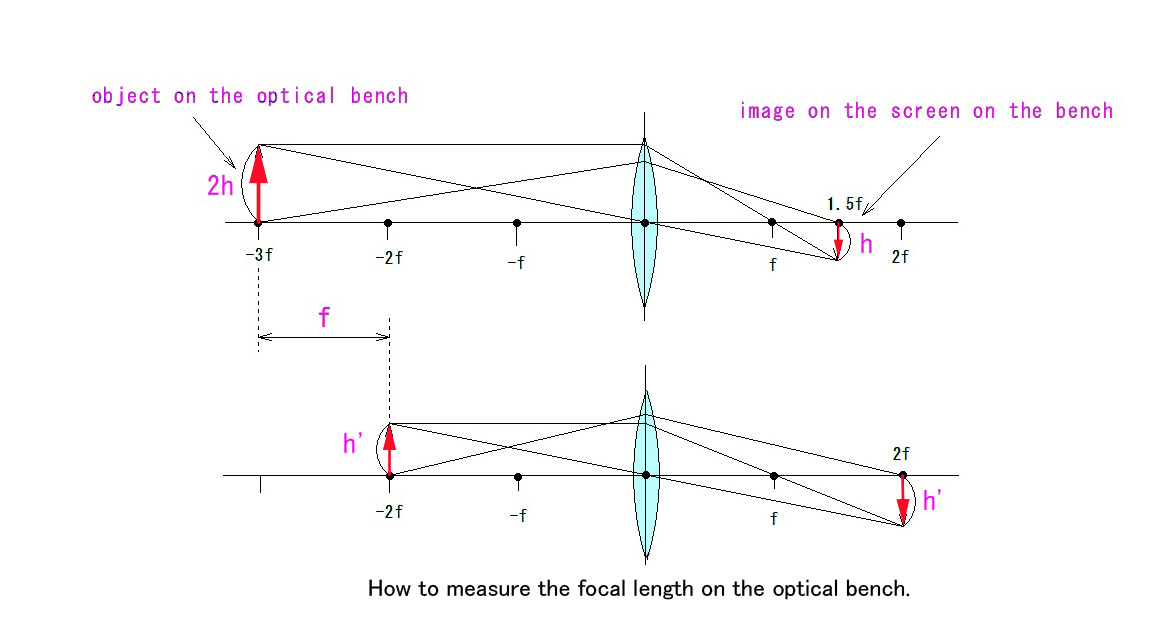
厚さが無視できない厚いレンズや、複数レンズ系の焦点距離を光学台上で測る方法のご提案です。
主点位置が特定できなくても、レンズを固定して、「物体」と「像が投影されたスクリーン」を動かし、物体 と 像 の大きさの比が 2:1 になった時に物体の位置を記録し、さらに 物体 と 像 を移動して大きさが 1 : 1 になったとき、「物体」の 移動距離 が 焦点距離 と等しくなります。
この方法であれば、内部構造が分からない複数レンズ系を非破壊(非分解)で焦点距離を測ることが出来るわけです。
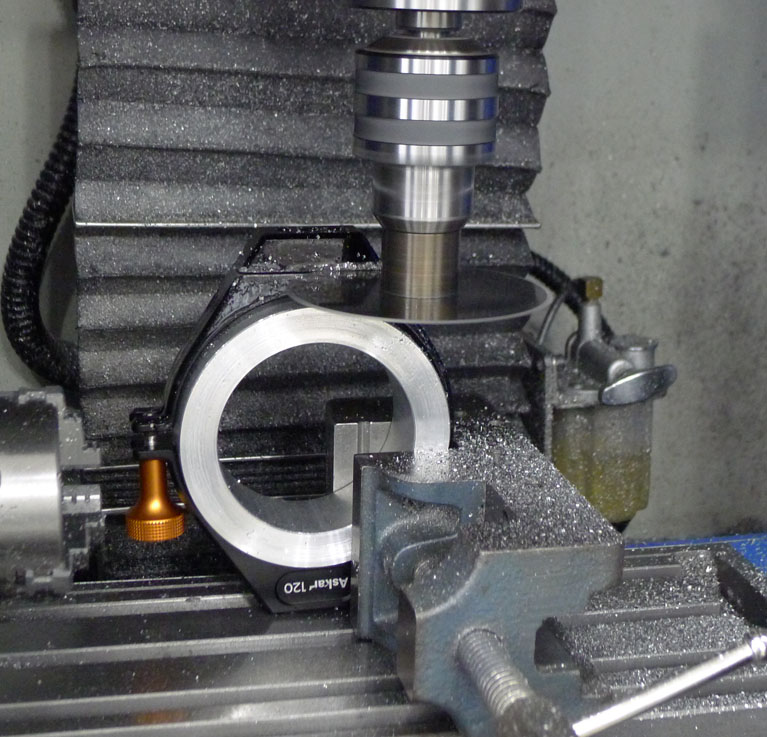
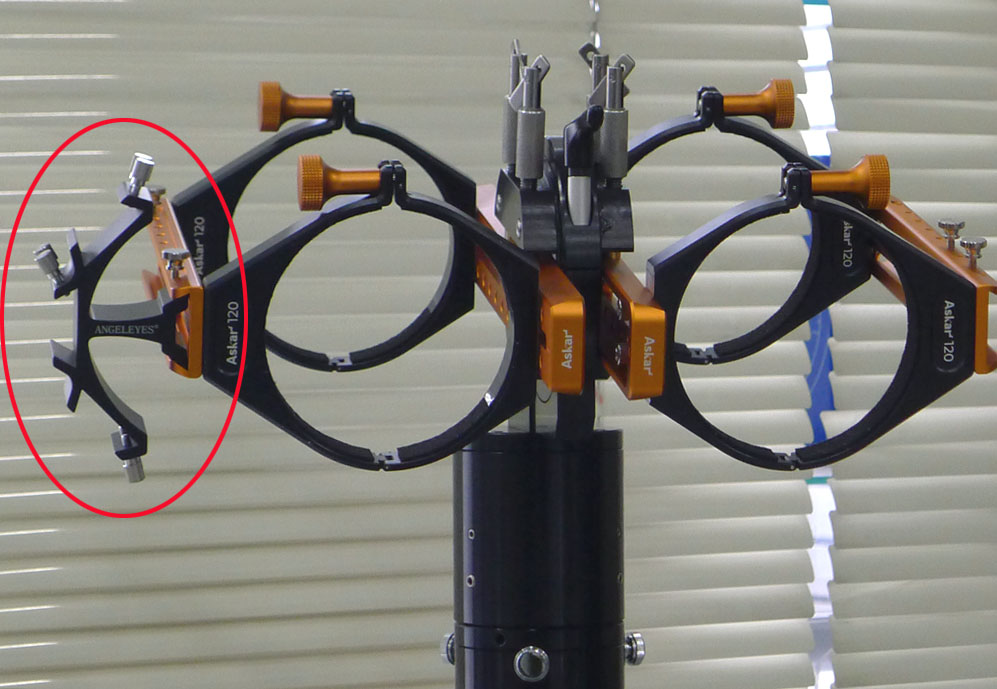
外径110Φ(鏡筒と同径)の治具を使用します。
粘いアルミ合金、木片をカットするような訳には行きません。深さ0.5mmずつ慎重に切り込んで行きます。
(危険な加工の部類に属します。)

切断加工後と加工前。
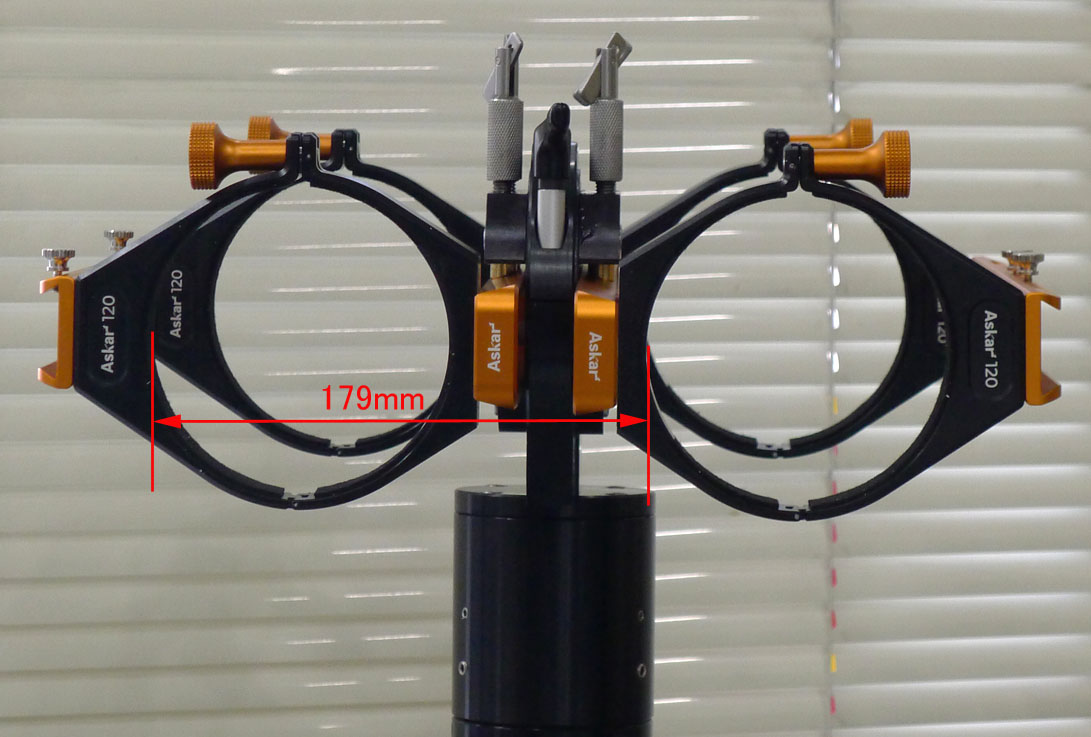
鏡筒間隔 D= 179mm を達成しました。(オリジナルのバンドのままだとDが大きくなり過ぎる。)

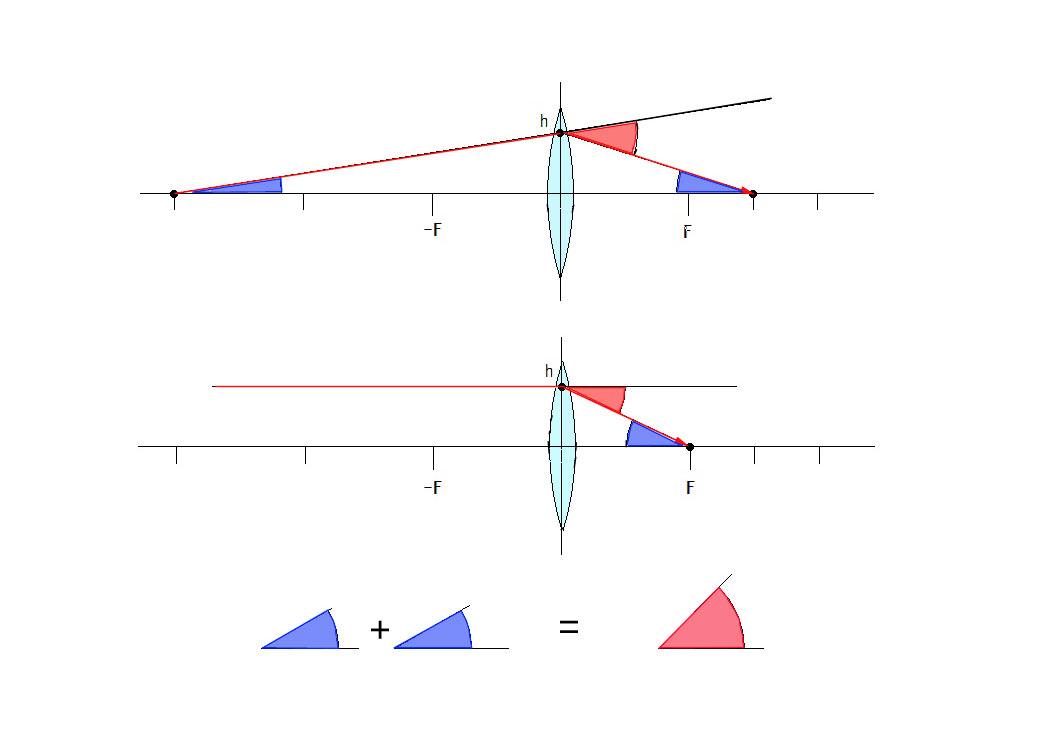
数式アレルギーの方のために、コアな部分を徹底的に可視化してみました。
近軸幾何光学で、お伝えしたいことはこれに尽きます。
青い角の合計 = 赤い角 です。
赤い角は、度数 Φ に h を掛けたもの。言い換えると、焦点距離の逆数、1/f に h を掛けたものです。
近軸領域では、入射光線の高さ h が同じなら、赤い角は常に一定だとういことです。


This is the first and the last Model of thermal radiation reducing version.
最初にして、最後?の熱放射抑制-Version (氷点下での結露抑制効果狙い)です。
(ヘリコイドも、在庫限りの超寒冷地仕様です。)
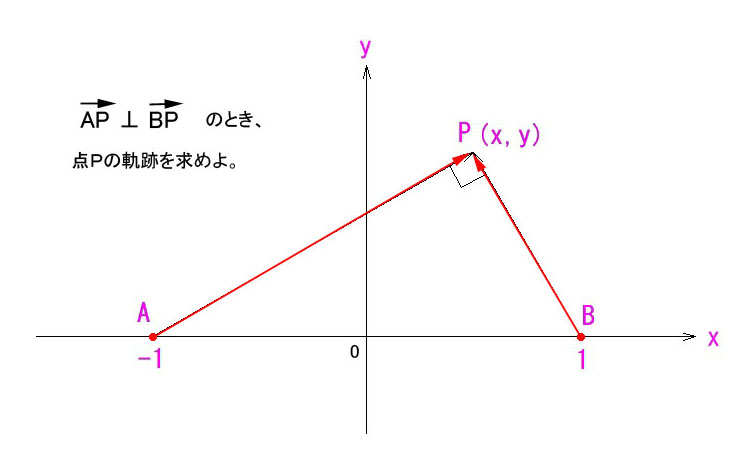
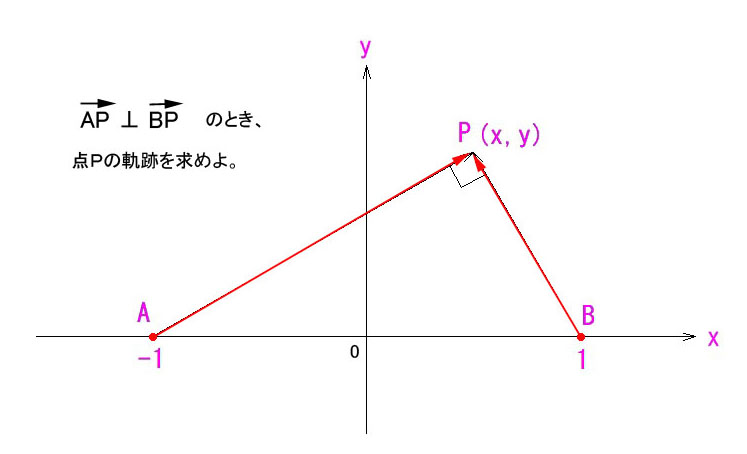
ヒント; 直交するベクトルの内積=?


EMS-UXLも、あと10セットくらいをめどに製作を中止する予定です。
純粋な個人営業ですので、永久に続けることは出来ません。3年をめどに一般向け及び業者さん向けの販売は中止し、以後はリピーターさんや友人のアフターに限定する予定です。
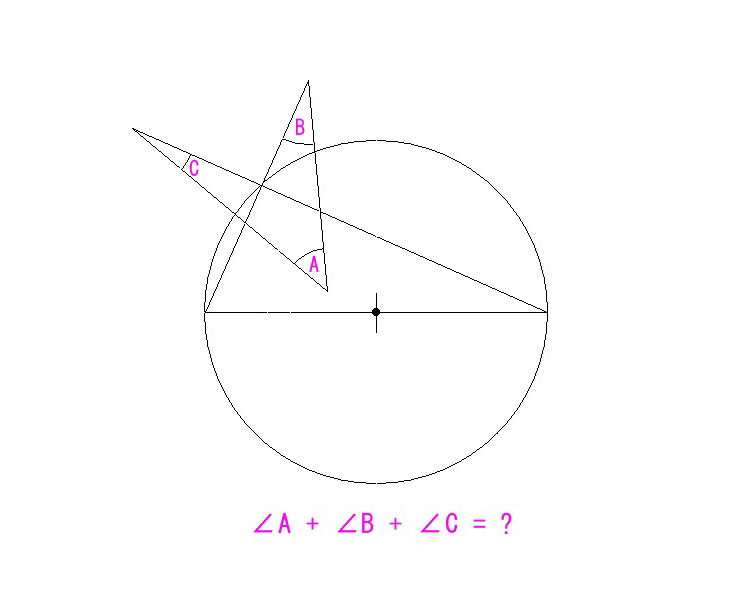
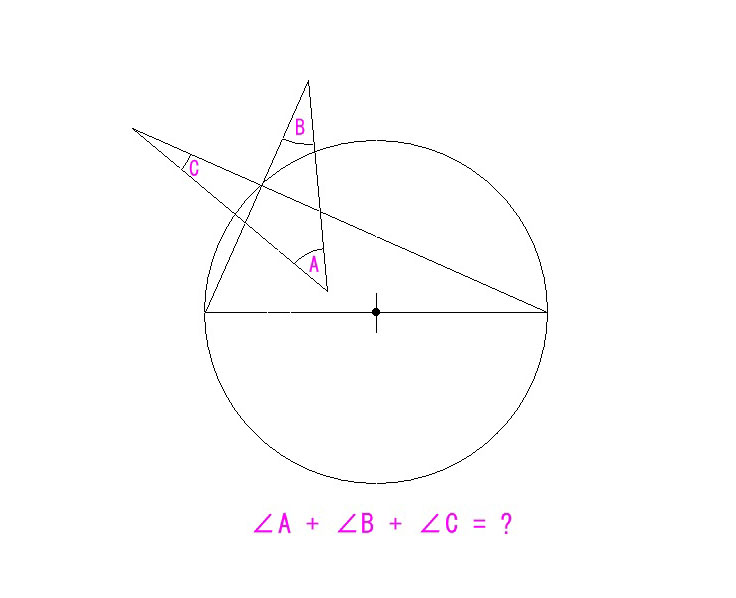
先日、9歳の天才少年が考えたクイズを、親御さんがFACEBOOKに投稿しておられた問題からの、応用問題を作ってみました。^^
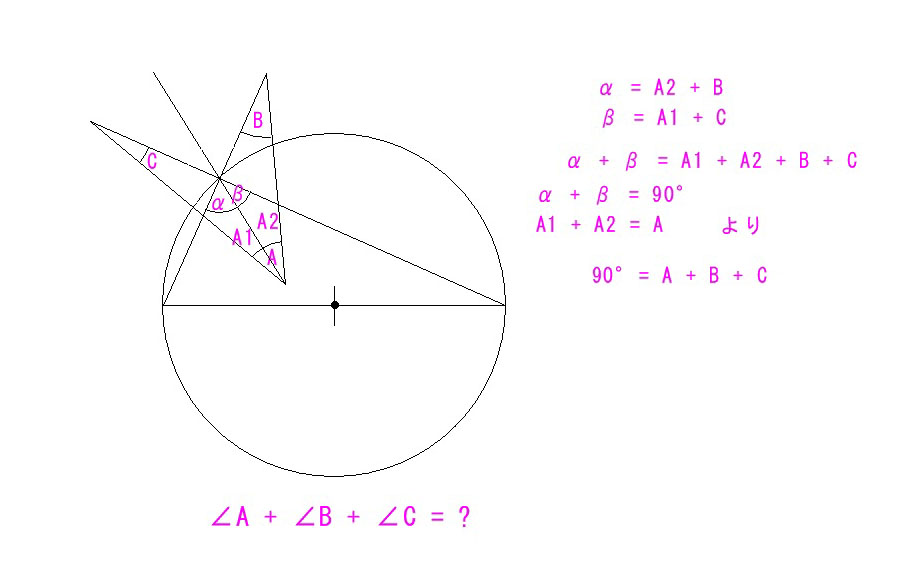
いろんなアプローチがあると思いますが、出題者の意図は、上図の通りです。
”三角形の一つの角の外角=他の2つの角の和”; 近軸幾何光学で頻出するんです。