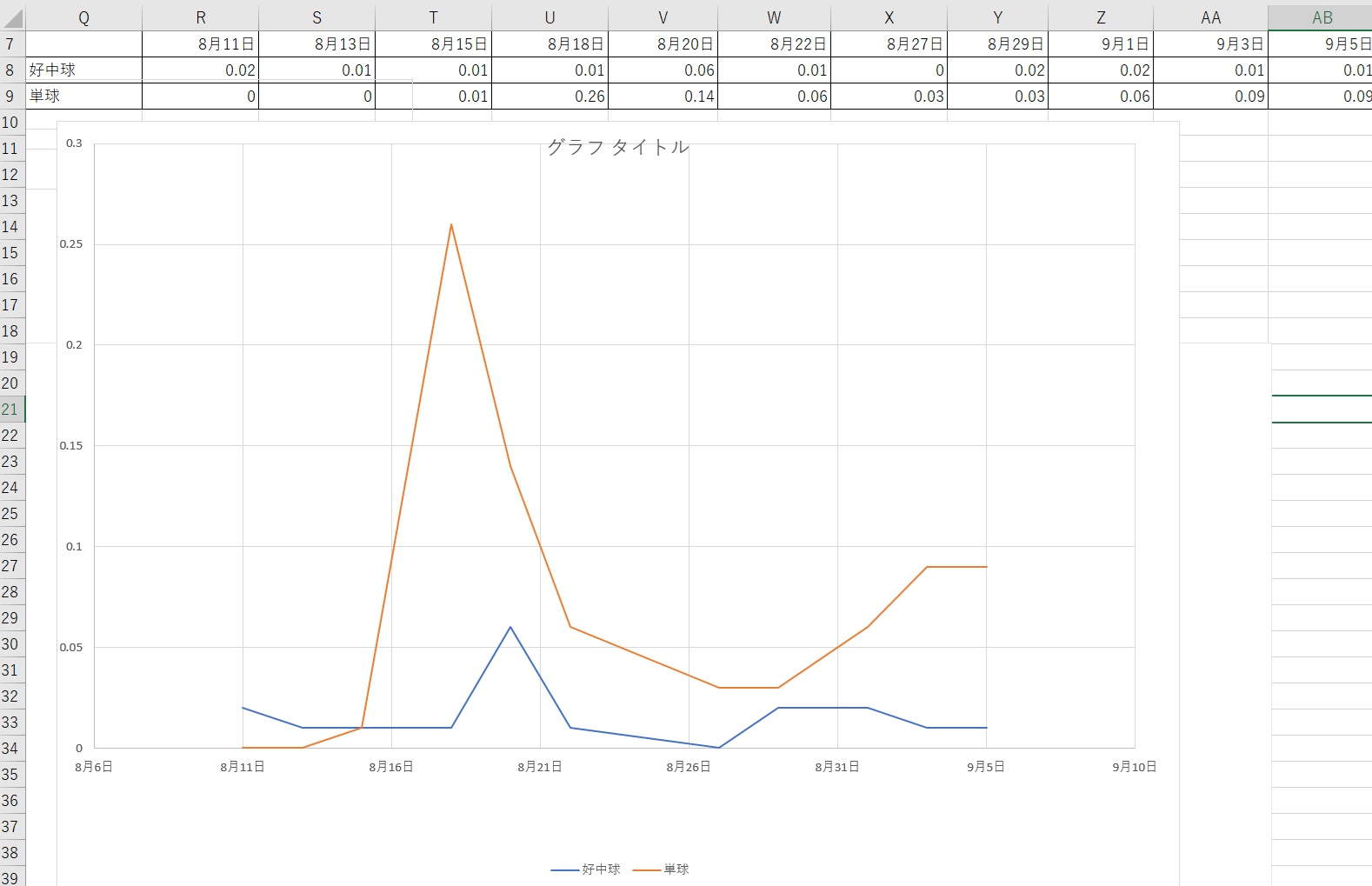
好中球がなかなか戻りませんが、単球(赤線)は正常値領域に入り、私の素人判断では、好中球(青線)の不足を単球で十分に補っている状態です。娑婆に戻る免疫力は付いたので、後は、血小板等の血球値がより安定して、輸血頻度が下がらないといけません。(でないと、退院後に頻繁に通院することになる。)
まあ、一歩、一歩、頑張ります!

Innovation of Astronomical Telescope
正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
日英併記としましたのは、海外向けの他、国内の方にも、より多い情報量を効率良くお届けしたい(共有したい)からです。
両者は必ずしも同一内容ではございません。英語の方がよりストレートに表現できる場合もありますし、両言語で内容を補完し合っていることもございます。
FACEBOOKでは、よりリアルタイムな情報とユーザー様からのフィードバックが見れますので、そちらもぜひご参照ください。
Please check my FACEBOOK, too.
You can see the older posts at the Internet Archives,too.
好中球がなかなか戻りませんが、単球(赤線)は正常値領域に入り、私の素人判断では、好中球(青線)の不足を単球で十分に補っている状態です。娑婆に戻る免疫力は付いたので、後は、血小板等の血球値がより安定して、輸血頻度が下がらないといけません。(でないと、退院後に頻繁に通院することになる。)
まあ、一歩、一歩、頑張ります!
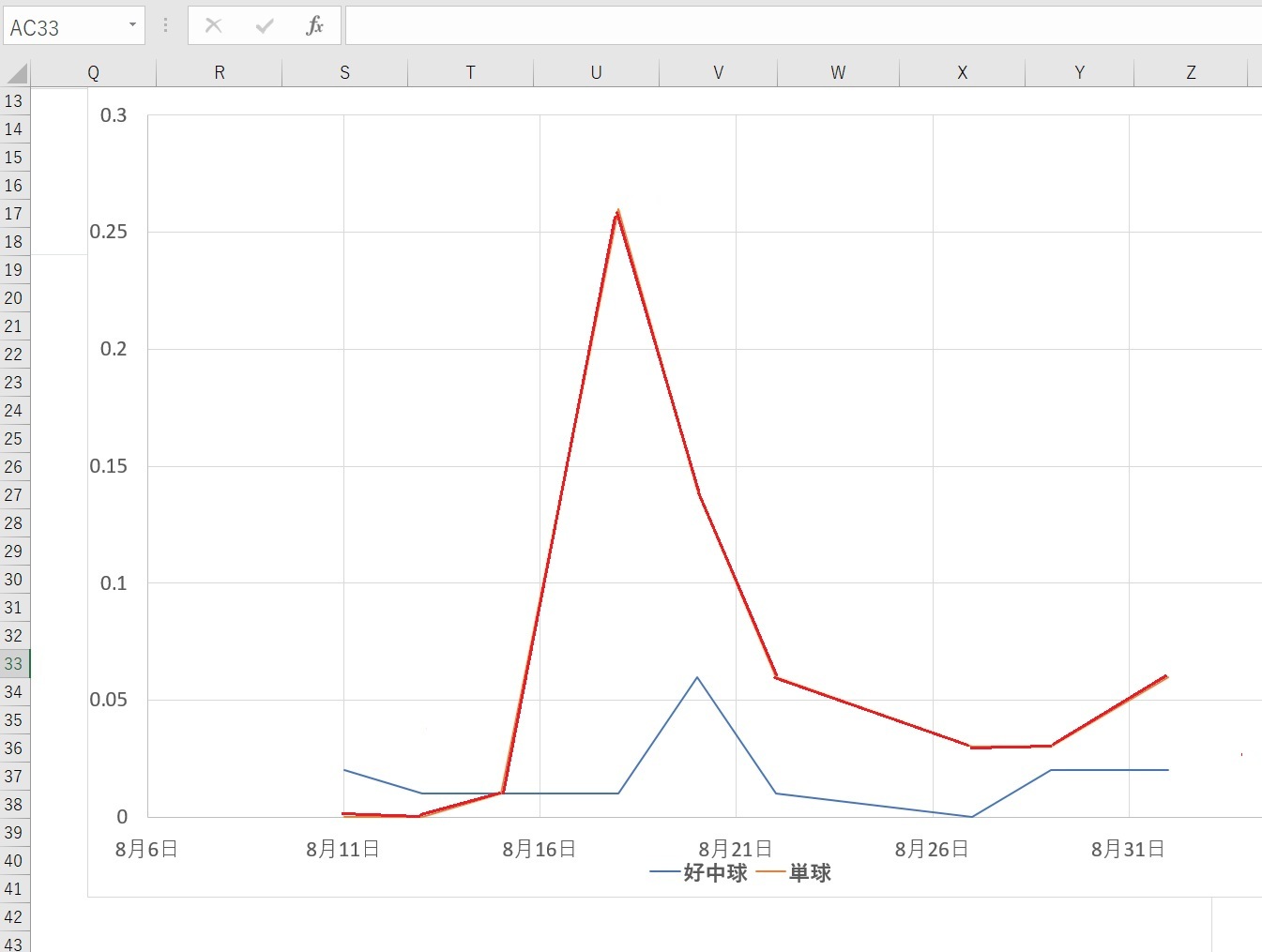
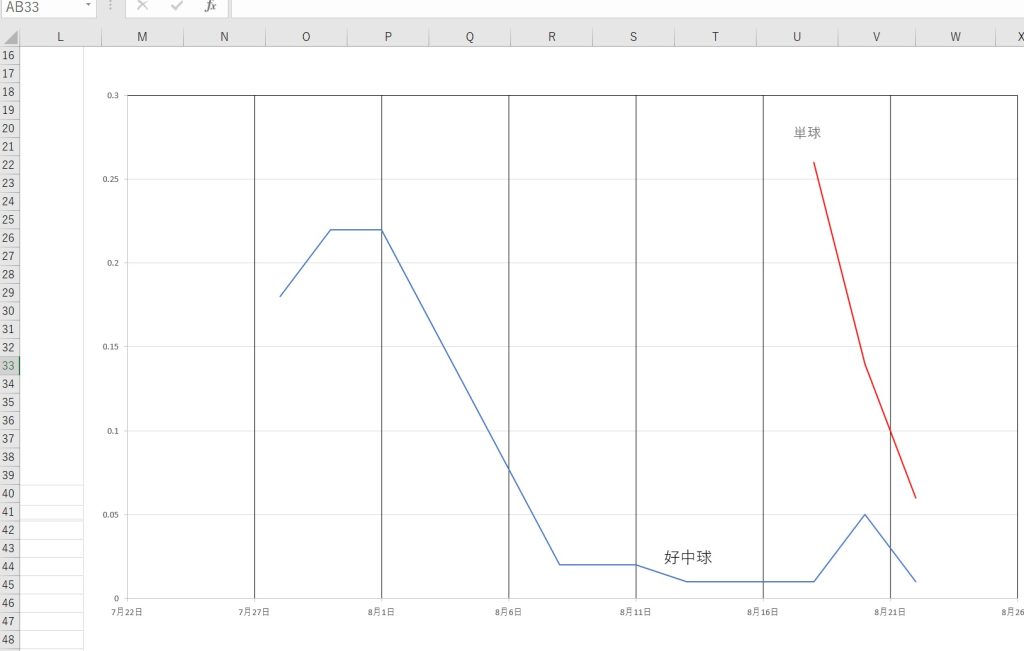
前クール(第三クール(7月))の後で急速な好中球の回復を見せた後、8月に入ってまた長く低迷してしまいました。
ただ、当方の場合、好中球よりも先に単球が回復する傾向があるので、まだ諦めていません。^^;(下の青いラインが好中球で、上の赤いラインが単球です。
【好中球】
好中球(こうちゅうきゅう)は、白血球の一種であり、体内に侵入した細菌や真菌などから体を守る主要な免疫細胞です。強い「貪食(どんしょく)能」を持ち、異物を細胞内に取り込んで消化・殺菌します。白血球の中で最も数が多く、感染症や炎症が起きた際には速やかに患部へ移動して防御反応を開始する、私たちの体を守る最初の防御ラインの役割を担っています。
好中球の主な特徴
役割:
細菌や真菌(カビ)の感染を防ぐことが主な役割です。
機能:
貪食能:異物を細胞内に取り込み、消化・殺菌します。
遊走能:感染部位に血管内から移動して集まる能力です。
殺菌能:顆粒に含まれる酵素や活性酸素などを用いて、侵入した異物を殺菌・無害化します。
寿命:
血液中での寿命は短く、約1日以内です。
場所:
骨髄で作られ、血液中だけでなく、炎症が起きている組織にも一時的に移動して存在します。
好中球の変動と病態
増加(好中球増多症):
細菌感染、炎症、外傷、がん、ストレス、喫煙などで一時的に増加することがあります。
減少(好中球減少症):
抗がん剤などの薬剤、ウイルス感染、骨髄の障害、脾機能亢進などで減少します。好中球の数が著しく減少すると、感染症にかかりやすくなり、重症化するリスクが高まります。
その他
血中の好中球の数は、血液検査で測定され、感染症の診断や病状の把握に役立ちます。
最近の研究では、好中球がDNAを網状に放出して病原体を絡め取る「NETs(Neutrophil Extracellular Traps)」という機能が発見されています。
【単球】
「単球」(たんきゅう)は白血球の一種で、身体の免疫システムにおいて非常に重要な役割を担う細胞です。単球は血液中を循環し、組織へ移行するとマクロファージや樹状細胞といったより大きな細胞に分化(変化)します。これらの細胞は、細菌などの異物を食べたり、がん細胞を破壊したり、さらには他の免疫細胞に情報を伝え、免疫反応を調節したりします。
単球の主な役割
異物の除去と排除:
単球は感染部位に移動し、細菌やウイルスなどの異物を細胞内に取り込み(食作用)、消化・殺菌します。
抗原提示:
取り込んだ異物の断片を自身の細胞表面に提示し(抗原提示)、T細胞などのリンパ球に情報を伝えます。
免疫反応の調節:
他の免疫細胞の働きを助けたり、免疫反応の開始を促したりすることで、身体全体の免疫機能を制御します。
tissue の修復:
傷ついた組織や壊死した組織を取り除き、組織の恒常性維持に貢献します。
単球に異常が見られる場合
単球の数は感染症、炎症、アレルギー性疾患など様々な病態と関連しているため、単球数の変動は病気のサインとなることがあります。
感染症や炎症の原因となっている疾患を治療することで、単球数の調整を図ることがあります。
単球の運命
単球は骨髄で生成され、血液中を移動します。
数時間のうちに脾臓、肝臓、肺などの組織に移行し、そこでマクロファージや樹状細胞に分化します。
抗癌剤治療は、昔から言われて来たように、正常細胞と癌細胞の我慢比べ! それまで正常に作られた来た白血球細胞がほぼ破綻するのは、短期的に毎回、想定内でしたが、今回に限り、7月に得た成果をすぐに吐き出されせられる!と言う想定外があって、医療陣側も、患者側も、実に辛い闘病が続きました。
「時間的にそろそろ改善するだろう!」と言う曖昧な期待だけが頼りですが、いつまでも客観データに触れないのも、誠意に欠けるな?と思った次第です。

右にくっついている回転ブロックがプロジェクター部分。最初に試した時はまだ屋内が明るく、昼行燈で、こんなので、大丈夫?と不安になりましたが、周りが暗くなり、輝度とピントを調整したら大丈夫でした。アラーム機能もあり、定時の目薬(抗癌剤の副作用防止)の点眼にも重宝しています。物欲も復活し、もう一度生きてみようと思えるようになりました。
投影式のデジタルクロック(MODEL-CR1024 by Amazon)
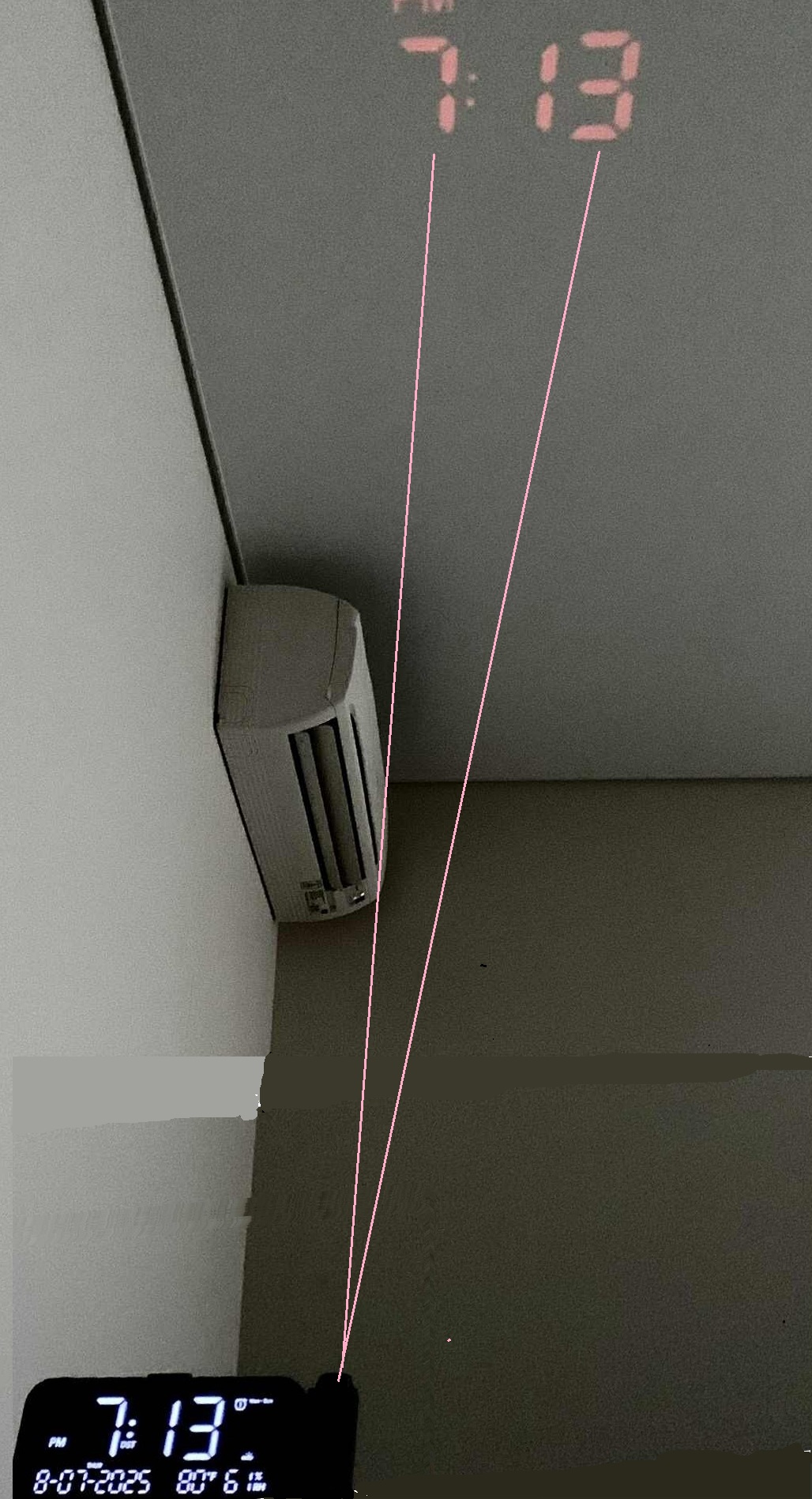
リアルの1枚画像だと、病院ベッドの簡易テーブル上のClock本体の文字と、天井に投影した時が遠すぎ、代表画像として不適切でしたので、クロック本体側の写真を一旦切り抜き、中抜きしましたが、使い勝手は元より悪くありません。
結構てこずりましたが、youtube を介さずに、直接 MP4 ファイルを投稿してみました。
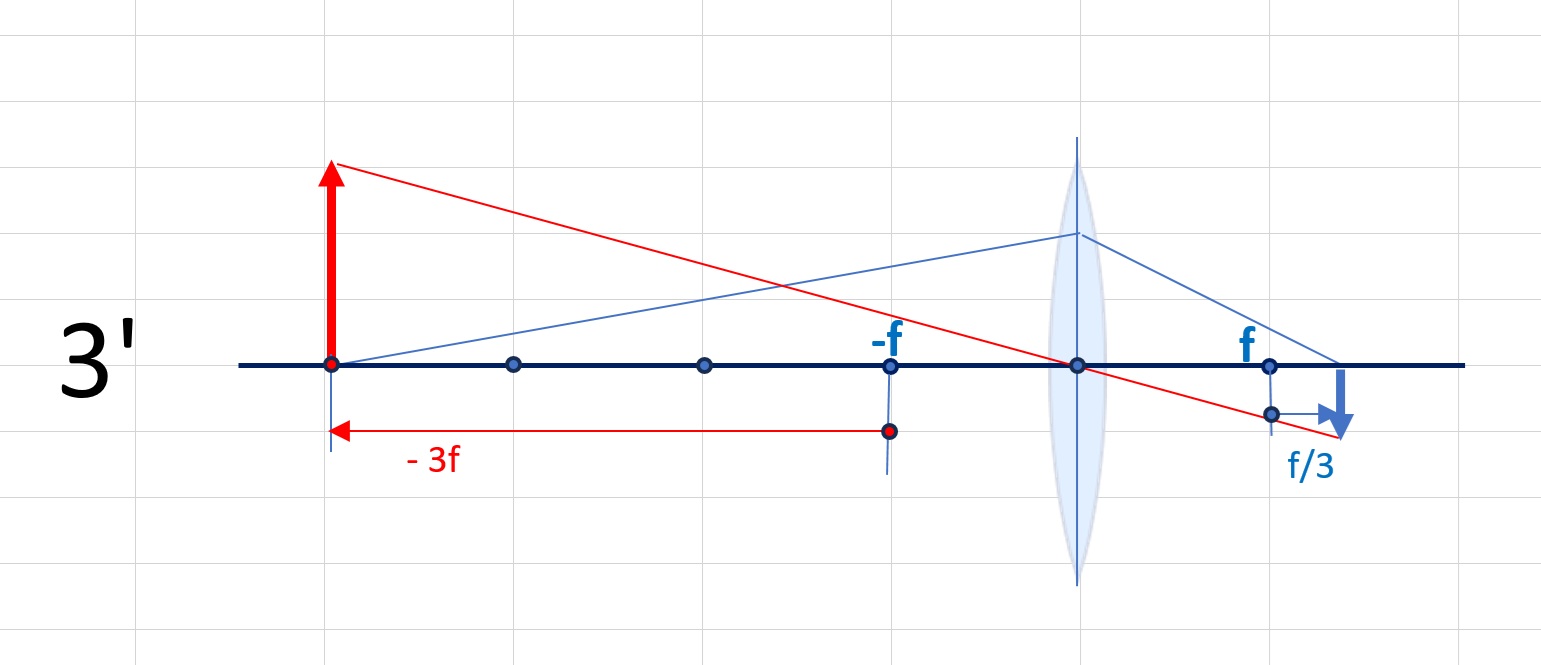
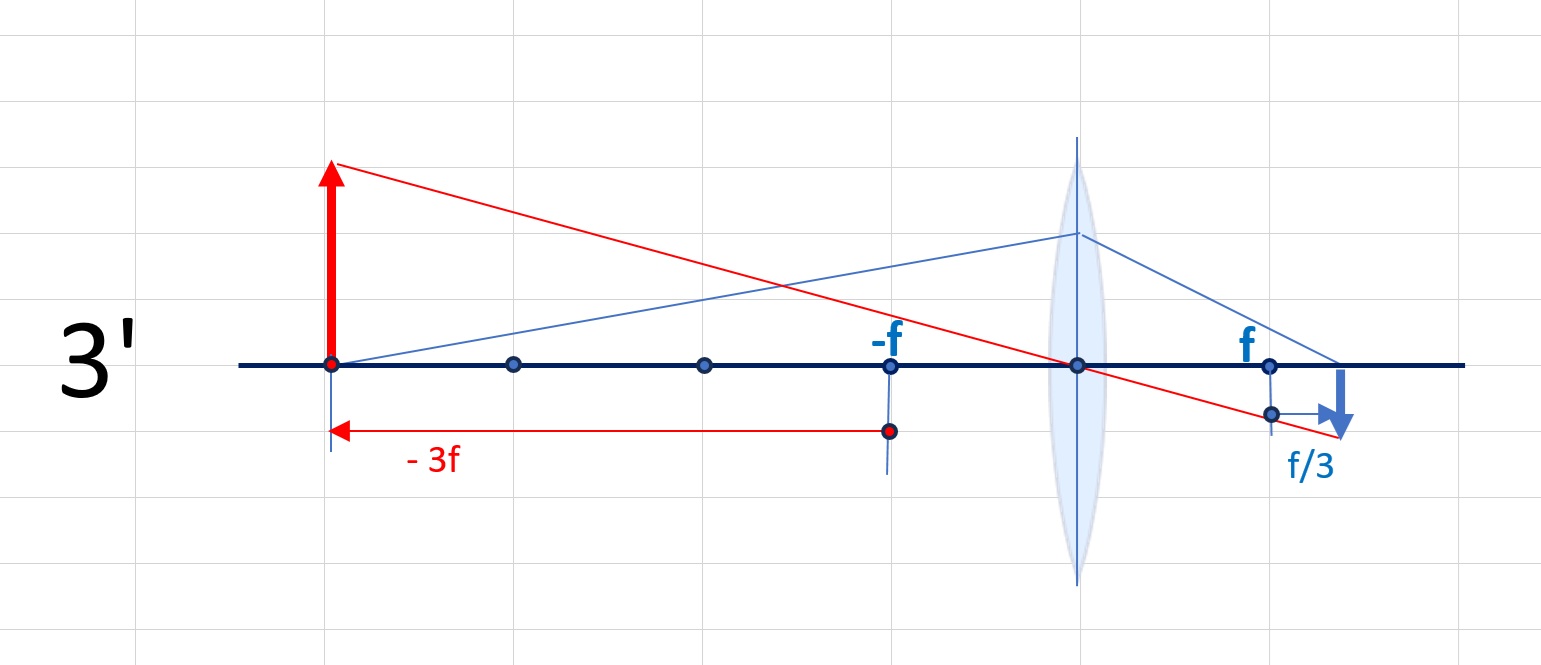
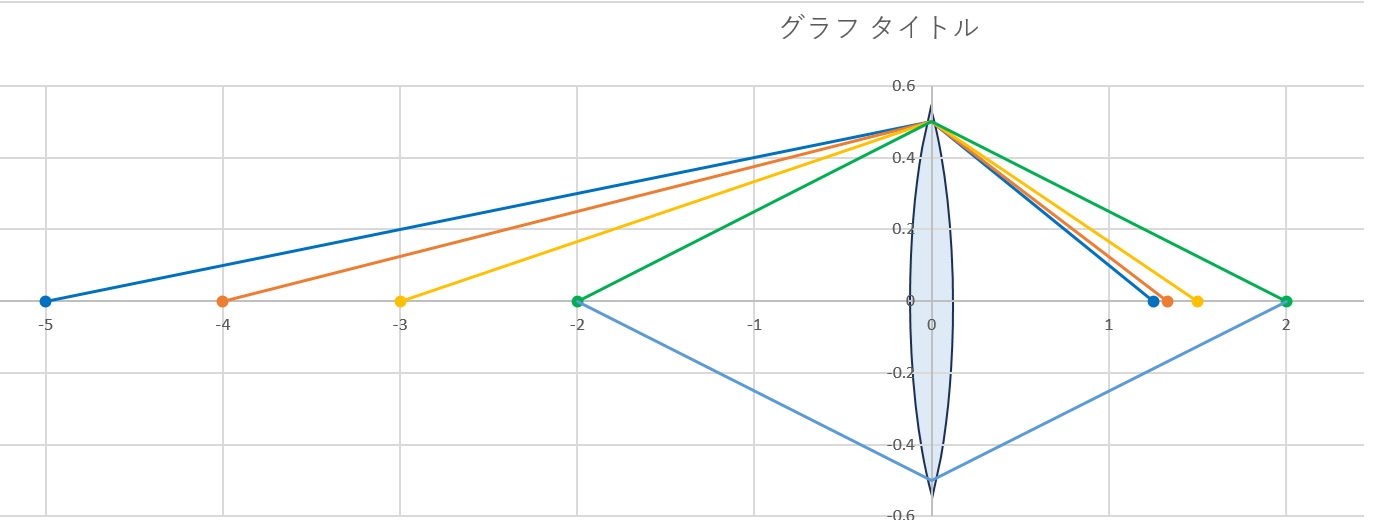
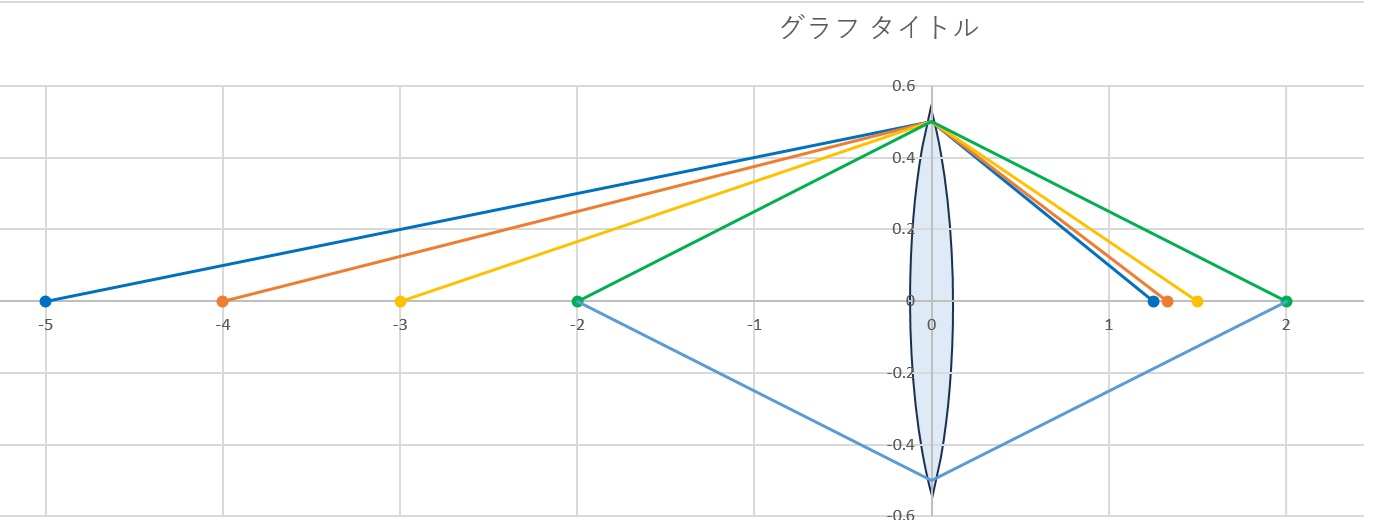
第3問を修正すると、こう ↑ なります。
(-3f) × ( f/3 )= -f^2 で、ニュートンの公式を満たしていますね。
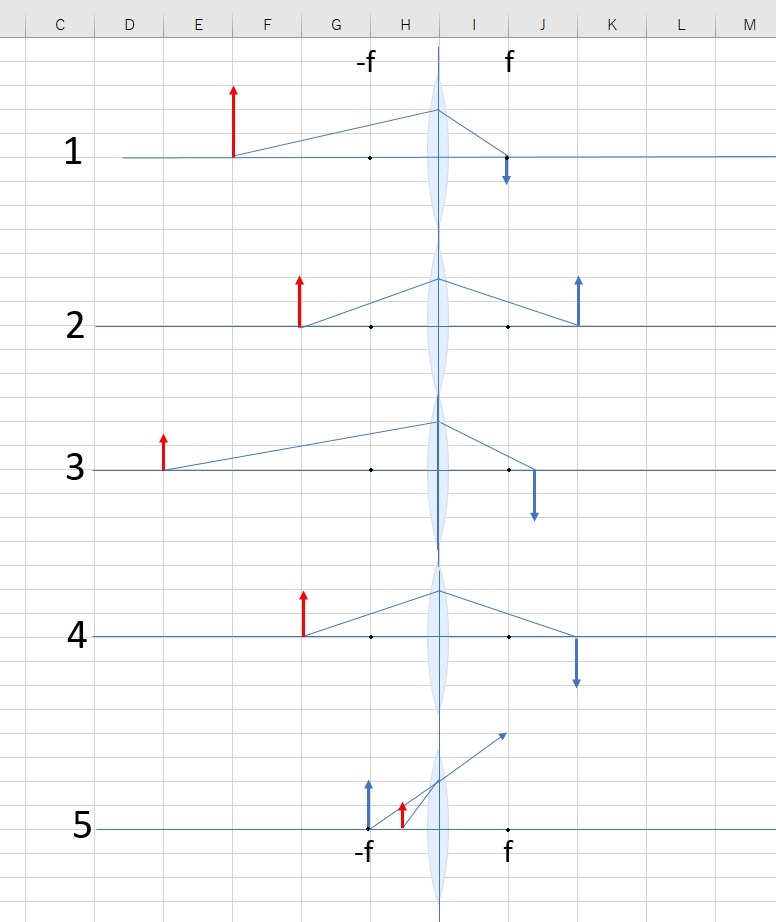
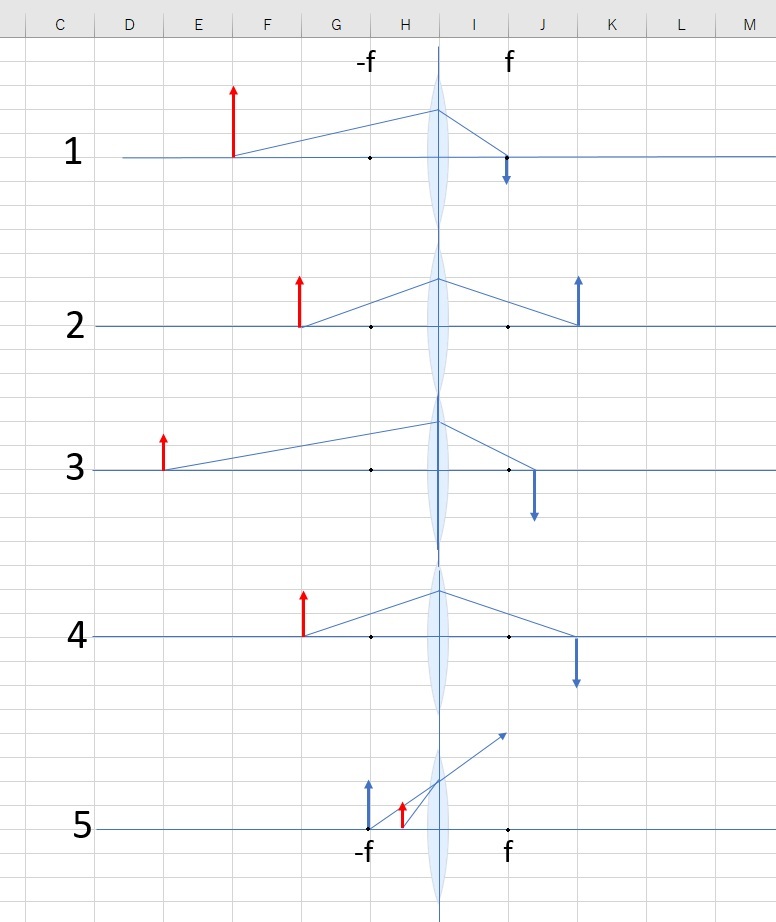
問題: 上の1~5 の光路図で、間違っている物(番号)を全て挙げよ!
* セルの横幅= f とします。
* 赤い矢印が物体で、青い矢印が像です。5は、虚像です。
* 光線はヒントになり過ぎるので、敢えて最小限に省いています。
その代わりに、セルの罫線がヒントになります。
Lens shape in the optical diagram of paraxial imaging is not so important. But the lens shape in the diagram will definitely enhance the intuitive understanding of the readers. And the beautiful lens shape will add value to the diagram.
I have been struggling with this issue, drawing a beautiful lens shape, with Excel for a whole day and night, in vain.
The issue made me feel tired and sleepy this morning!
I asked my nurses for the solution of this issue with Excel this morning in vain, but after 15 minutes, my attending physician kindly came to my room, and She was able to show me the perfect solution in Excel almost instantly!!
Above is the best lens shape I could make with the help of my loving Doctor!
近軸光線追跡は、レンズの厚さを”0”と想定しており、光路図にレンズ形状を挿入することは、さほど重要ではありませんが、読者の直感的な理解のためと、光路図自体の審美性には、欠かせません。
寝不足で、憂鬱な朝を迎えた今朝でした。
エクセルに長けた看護師さんが2名ほど来てくれても解決せず、半ば諦めていたところ、15 分後に、何と、主治医の先生が病室に来てくれ、すいすいと、ほぼ一瞬で感激の解決! 上図が、それでゲットした、今までで一番綺麗な ”レンズシェイプ” を挿入した、初めての光路図です。 これで、下がっていた免疫値も回復しそう!LOL
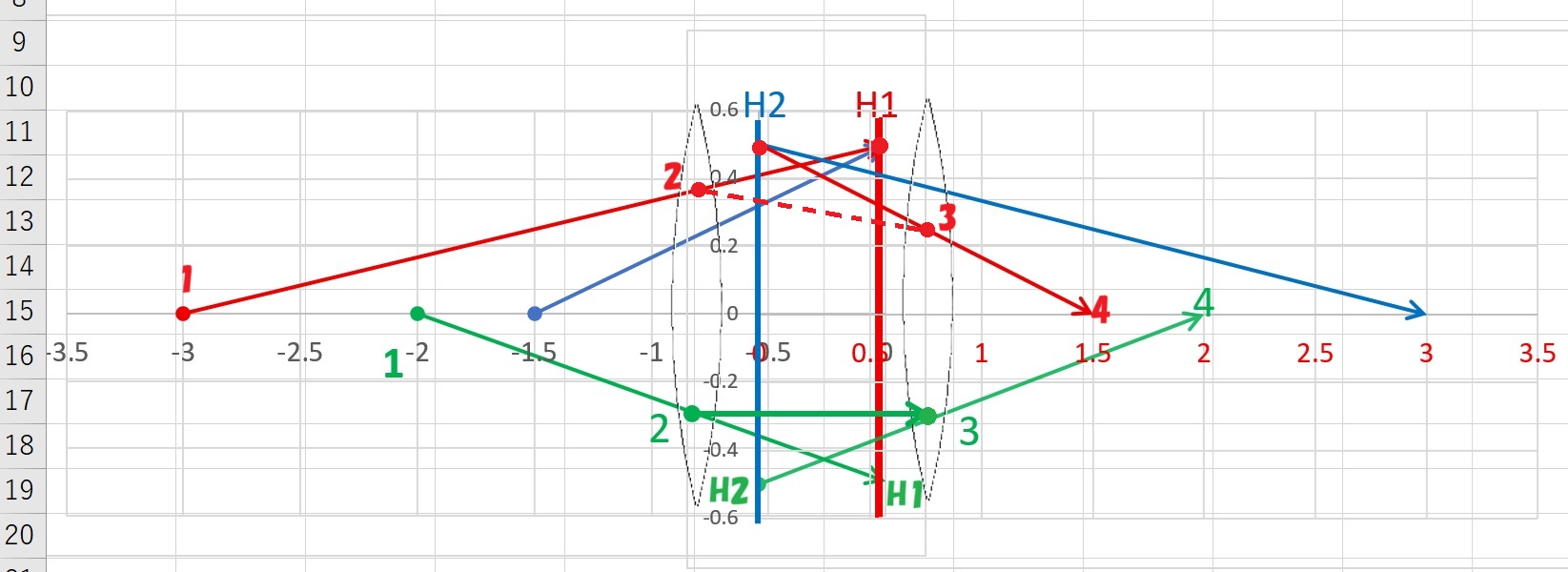
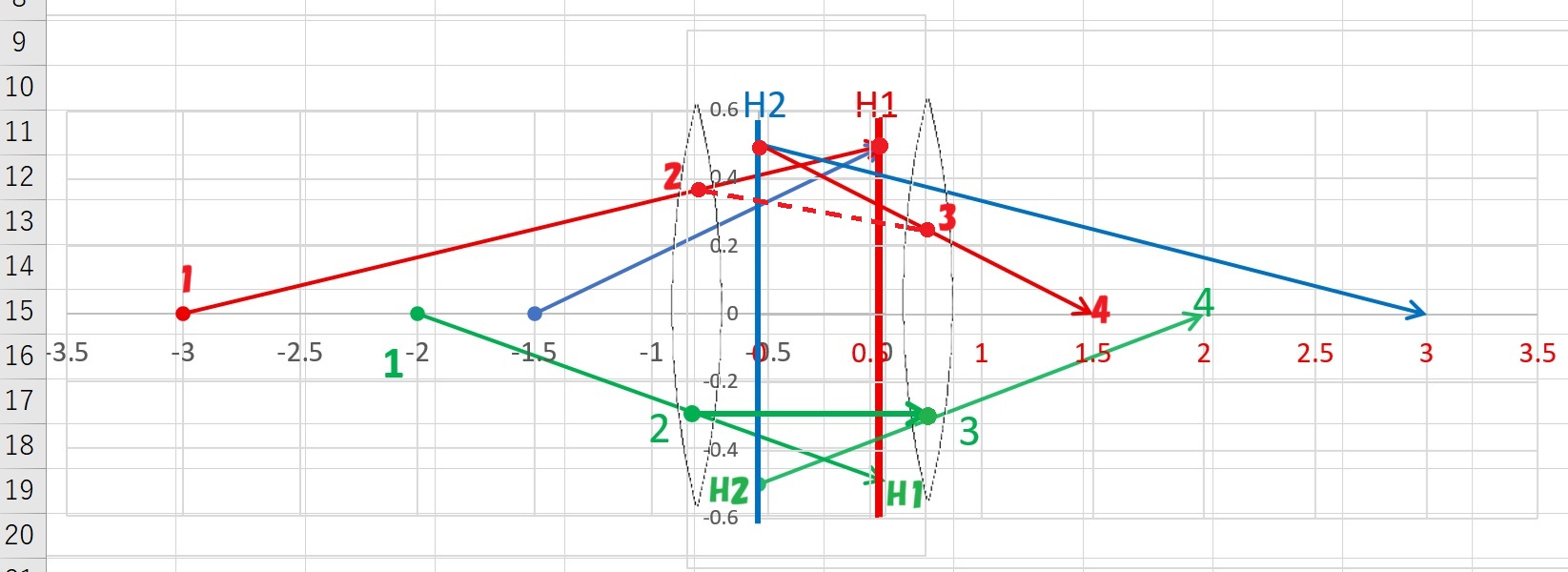
順番が交叉した両主面について、全くご質問がないので、先回りしてご説明します。
当初は、物空間にあるのが物側主点で、像空間にあるのが像側主点だと思うのが自然ですからね。初学の段階で、交叉した主点(主面)関係を見せつけられたら、真面目に取り組んでいた方ほど、頭をガーンと殴られたような衝撃があったはずです。(私も当初はそれで悶絶しましたから。)
初めて交叉した主面の光路図を見せられたら、光線が両主面間で折り返しているのか?と思ってしまう方もいるかも知れません。
そうした方に安心していただくため、あるいは、勉強の継続を断念してしまった方を呼び戻すために、少々ややこしい作図 ↑ をしてみました。
分かりやすく可視化したつもりで、図から直感的にご理解いただけると思っています。
赤と緑の系列だけに、実際の光路 (1→2→3→4) をお示ししました。光線自体は、両主面上の H1 も H2 も通るわけではなく、そこ(H1)に向かって、そこ(H2)から出て行く、というものです。(H1,H2 はそれぞれ、虚物点と虚像点ですから。)
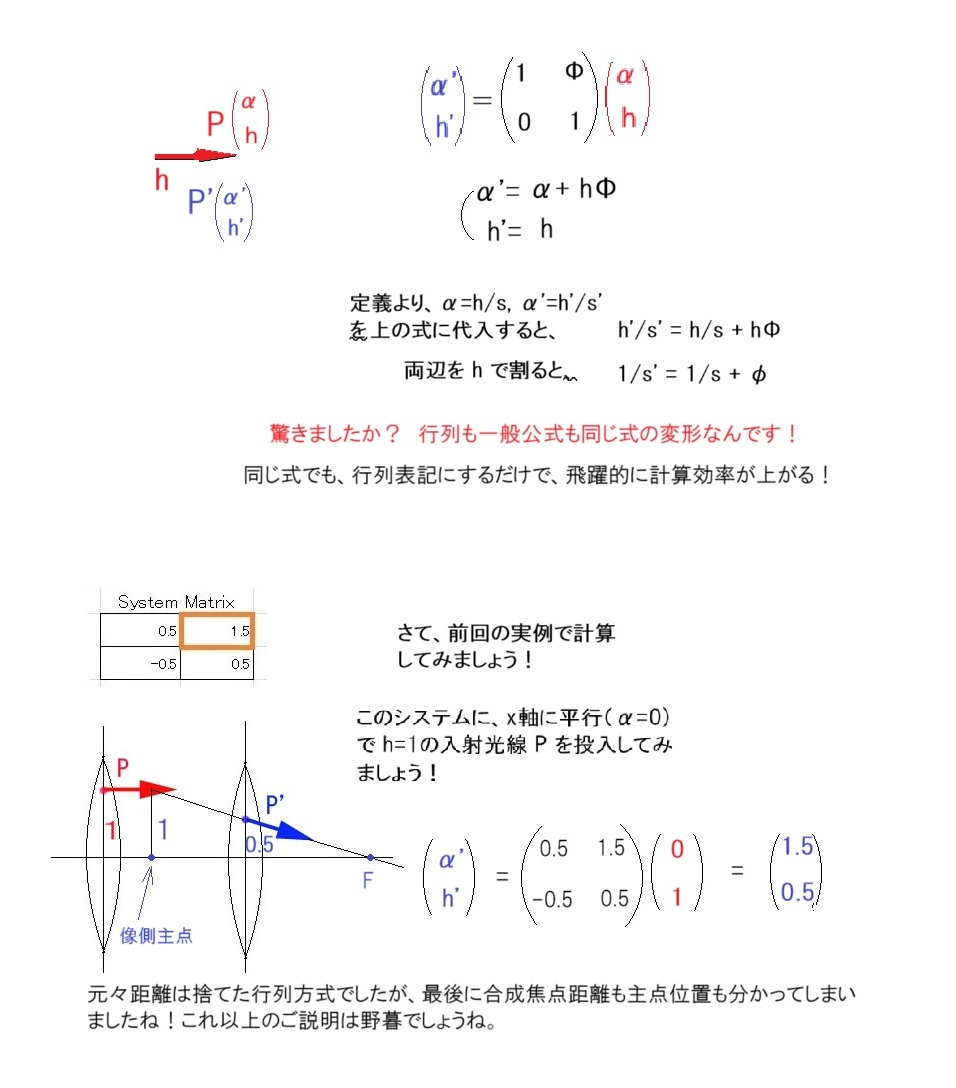
行列を用いた近軸光線追跡や、主点位置の算出について、不慣れな方が多いと思い、追加説明をさせていただきます。
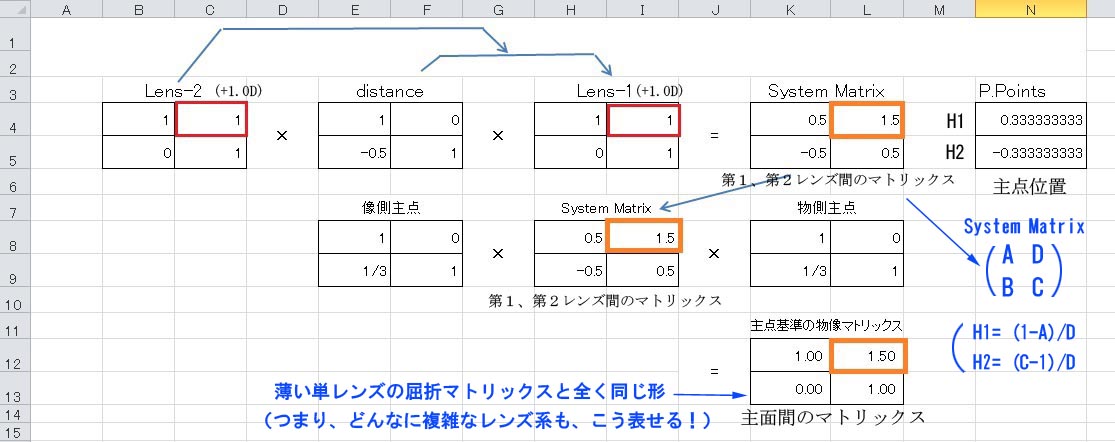
まず、レンズ系のモデルは、+1.0D の薄い凸レンズを2枚、0.5mの間隔で保持した、シンプルなものです。 シンメトリックな光学系なので、両主点位置も対称配置になります。
薄レンズは、シンプルな屈折マトリックスで表現できます。
レンズ間隔は、これもシンプルな移行マトリックスで表現します。
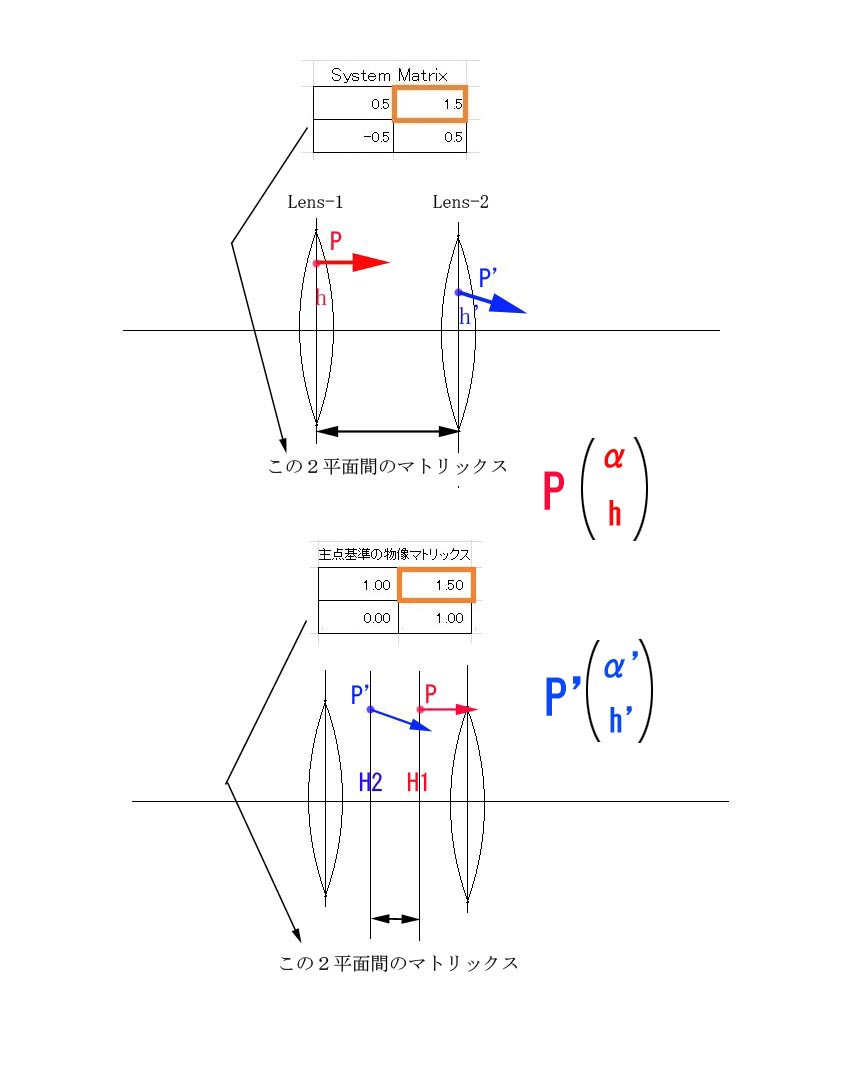
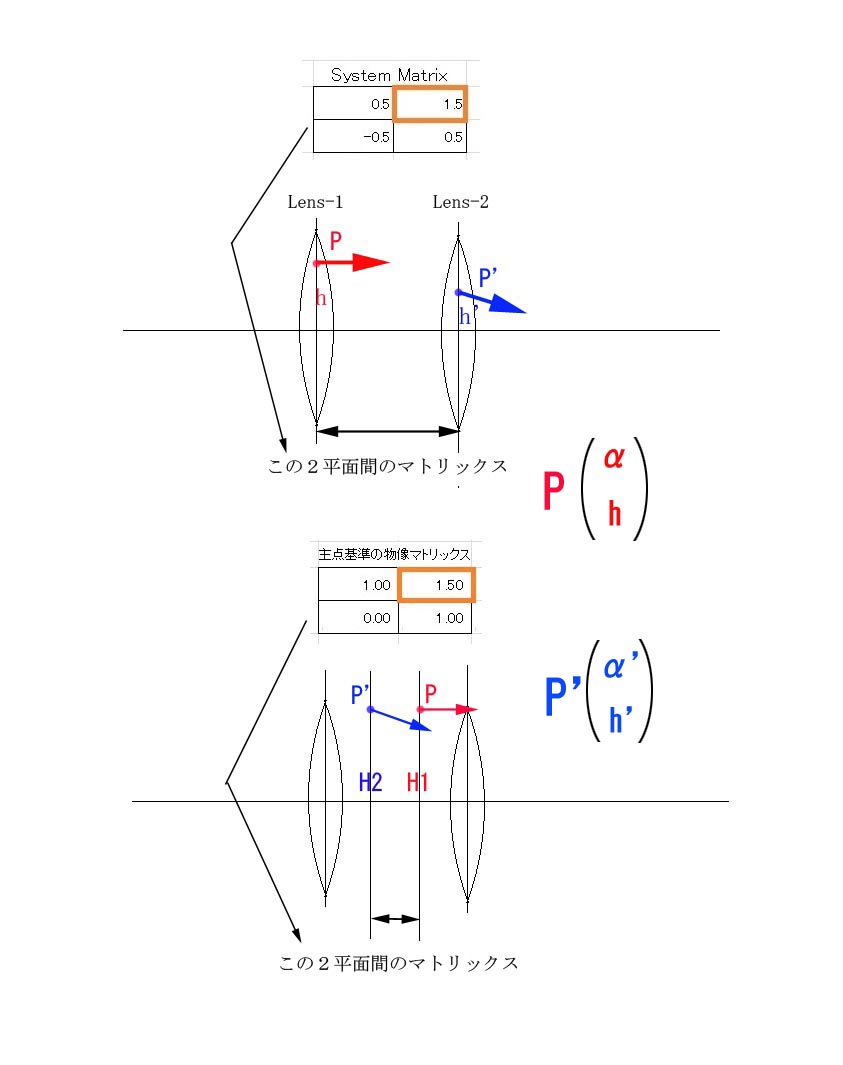
まず、単純に、レンズ1の屈折マトリックスにレンズ間隔の移行マトリックスを掛け、それにレンズ2の屈折マトリックスを掛けると、レンズ1~レンズ2の間のシステムマトリックスが得られます。
そのシステムマトリックスから、主点位置が簡単に求まります。
さらに、そのシステムマトリックスを挟むように、両主点位置の移行マトリックスを掛けると、両主面間の別のシステムマトリックスが得られます。 何と、それは薄レンズの屈折マトリックスそのものになります。
システムマトリックスは、計算途中を含め、右上の要素が常に合成パワーになり、行列式の値は常に1です。
今回は、ご参考のために、主点基準のシステムマトリックスの導出をお示ししましたが、実は、この計算は全く不要で、合成パワーが最初のシステムマトリックスで分かれば、それを単レンズのパワーとして、屈折マトリックスを組めば良いのです。
一般的な結像公式(1/s’ – 1/s = 1/f ) は、3つの向きを持った距離同士の関係式ですが、
行列の方法は、距離を問題にせず、指定した2面間を通る光線の通過点に於ける光線のx軸方向に対する傾き(α)と、その点の高さ(h)を求めます。 当初は、何でわざわざ?と思うでしょうが、一般的な結像式は、単レンズの光線追跡には有効ですが、レンズ枚数が多くなるほど、計算が複雑になるのです。行列の方式だと、何個でもその構成行列を掛け合わせることが出来るのです。
システムマトリックスは、指定した第1の面上の P から、もう1つの面の P’ を得るための行列です。
興味を持たれた方は、今までの屈折マトリックス等の関連記事を今一度ご参照いただけると、よりご理解が深まるかと存じます。