正立ミラーシステム(EMS)を開発した松本龍郎のサイト。 たった2回の反射で天体望遠鏡の像を正立像にします。
Tatsuro Matsumoto; Inventor of the EMS, Erecting Mirror System. EMS offers non reversed upright image with no additional undesirable abberations.
カテゴリー: BINO Progress Report | 製作状況速報
日英併記としましたのは、海外向けの他、国内の方にも、より多い情報量を効率良くお届けしたい(共有したい)からです。
両者は必ずしも同一内容ではございません。英語の方がよりストレートに表現できる場合もありますし、両言語で内容を補完し合っていることもございます。 FACEBOOKでは、よりリアルタイムな情報とユーザー様からのフィードバックが見れますので、そちらもぜひご参照ください。
Please check my FACEBOOK, too.
You can see the older posts at the Internet Archives,too.
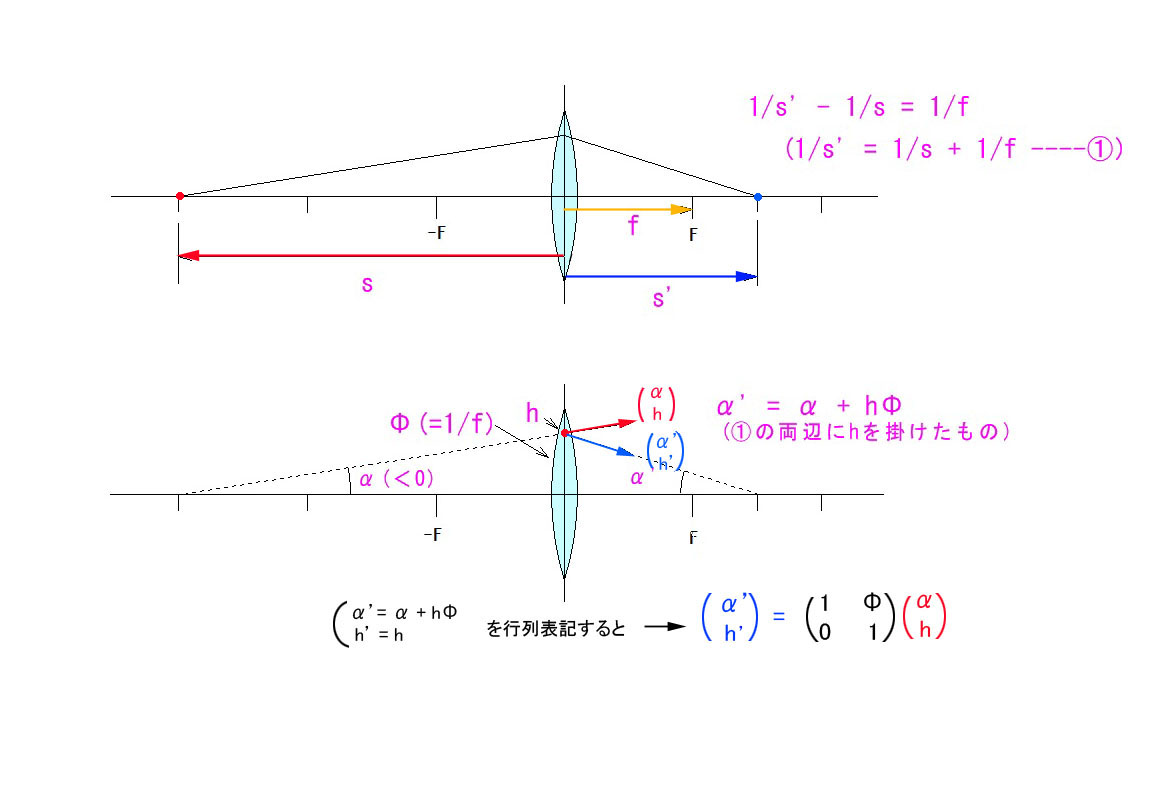
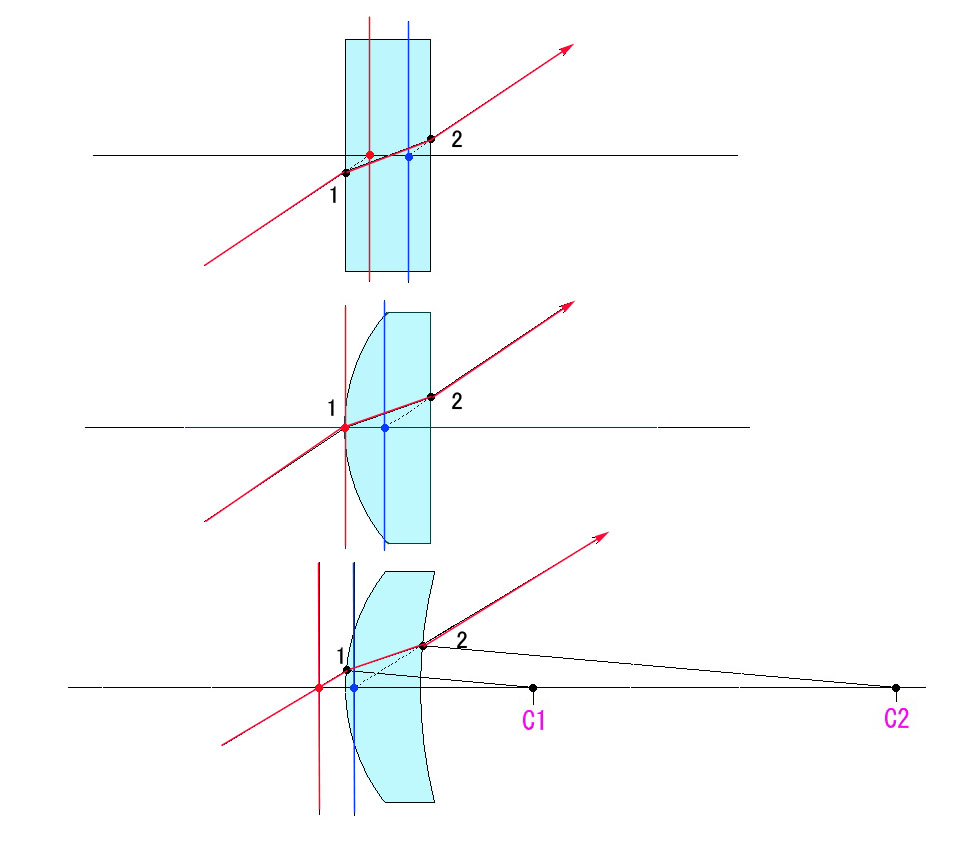
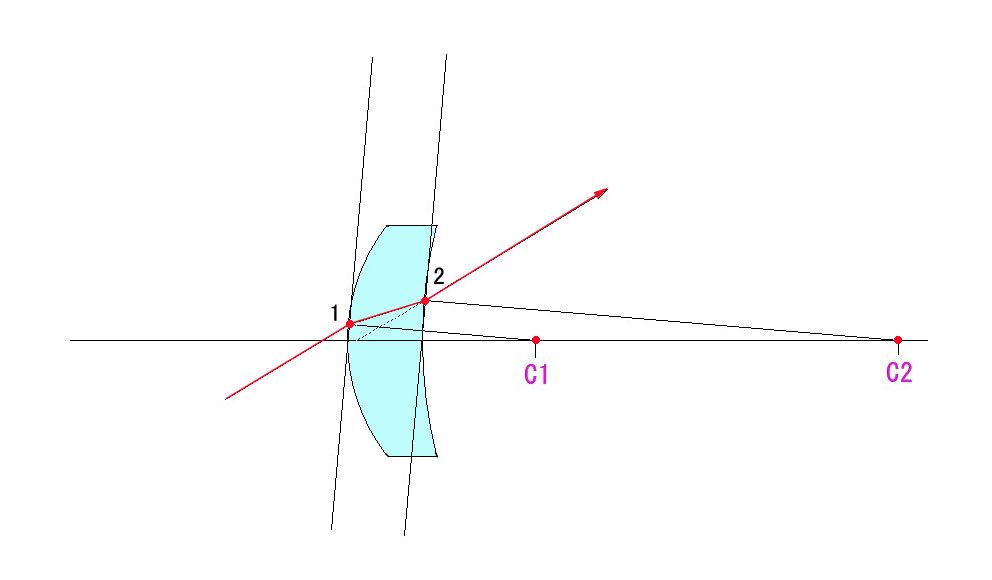
下の図は、距離の代わりに、光線の特定位置(この場合はレンズ上の光軸からの高さ)に於ける光線の角度(h/sで定義された角度)を使用します。もともと両者は同じ数式を変形したものであり、下の図の方法は、計算の効率を上げるのに有効です。 h が加わることで、パラメーターが4つになったようで、混乱されるかも分かりませんが、hは、αを定義する時にすでに設定しているわけですから、心配無用です。途中で尺度を変更しない限り、初期値は任意の数値を設定すれば良いのです。この h が後で、凄い役割を発揮するのですが、実際に運用して見られたら分かります。