
The new EMS-UXL-Super-Premuim is near completion. Here is the principle of the innovative focal compensator on the IPD adjustment mechanism.
半年以上お待たせしてしまったEMS-UXL-Super-Premuim(ドイツ)が、もうすぐ完成します。 ベアリングのワッシャーの在庫が切れたため、仮組み立てが一日ほどお預けになりました。 今回は左右単独補償ですが、原理は前回のC5-BINOの左右同時補償機構と同じなので、必ずうまく行くはずです。 EMSがあたかも自由スライドチューブで宙吊りで不安定に見えるかも 分かりませんが、決してそんなことはありません。 なぜだかお分かりですか。
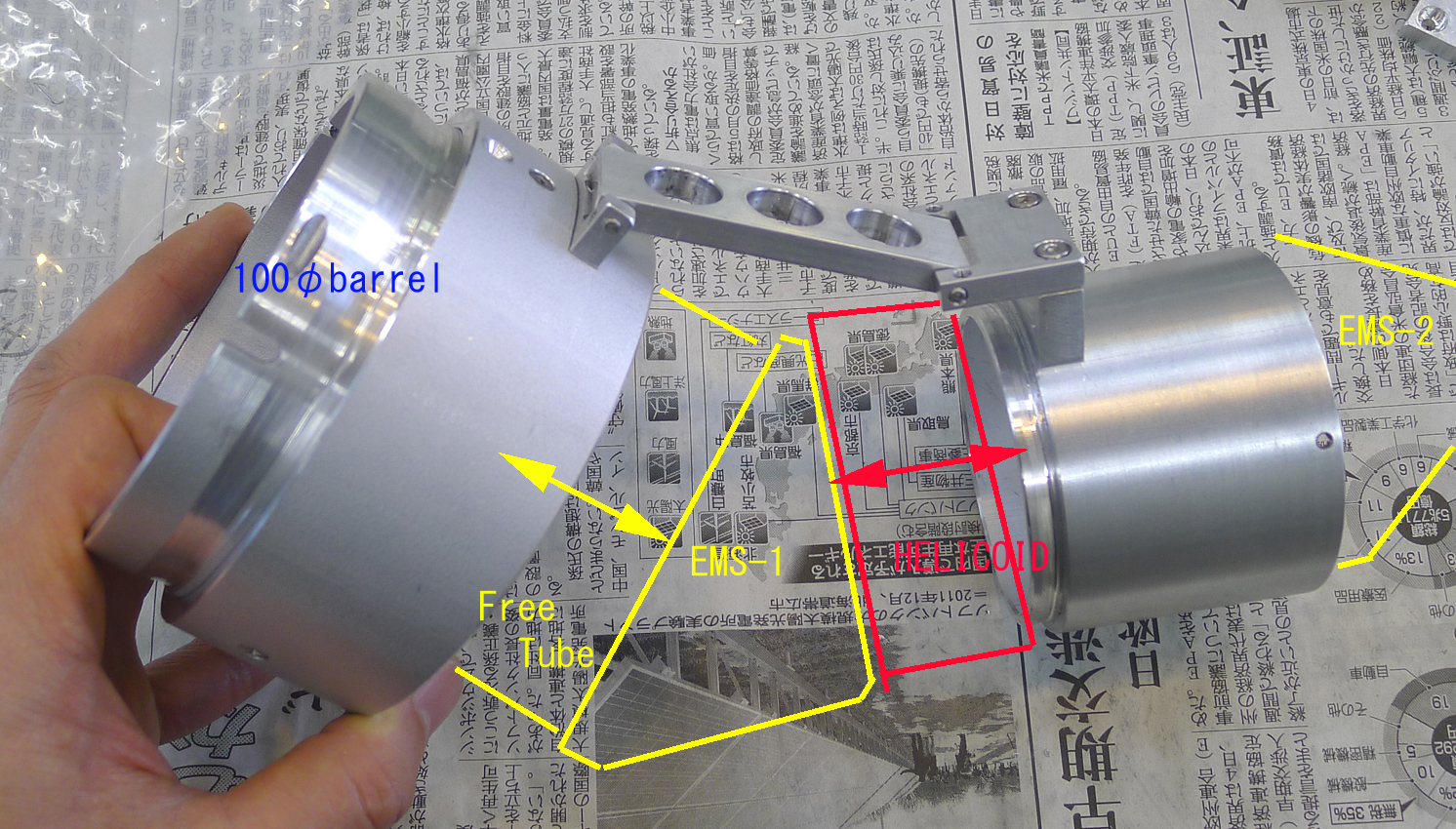
赤い枠で示した部分がヘリコイドで、使用者は通常通り、ヘリコイドを伸縮させて 目幅調整を行えば、自動的に自由摺動パイプが連動してピント移動の収支を常に実用上 ゼロに保ちます。 その連動の役目を果たすのが、たった1本のヒンジ付きロッド(写真の、丸い穴が3つ開いたプレートのこと)で、 これは、ヘリコイドの回転方向の負荷をかなりの割合でカバーする、スタビライザーの 役目も兼ねます。 ヘリコイドの負担を軽減し、回転ガタの心配もなくなるわけです。
ピント補償機構は、あらゆる機構を試しましたが、最終的に最もシンプルな方法に 落ち着きました。 この原理は、目幅調整のフルストロークでのピント補償を数学的な厳密さで補償するものではなく、厳密には標準目幅(64mmくらい)で微分的に成り立つものですが、 実用的には、調整域の全てでピント誤差は視認できないレベルであることがC5-BINOで実証されています。(目幅を変える時は観察者が交代する時ですから、微小なピント誤差は尚更問題になりません。)